
Um ano se passou desde que o lançamento da missão do rover Rosalind Franklin da ESA foi suspenso, mas o trabalho não parou para as equipes da ExoMars na Europa.
A Agência Espacial Europeia lançou um programa especial de 15 minutos que atualiza o que aconteceu desde que a missão foi cancelada em 2022 por causa da invasão russa da Ucrânia, o plano futuro, os novos desafios, o último teste de perfuração profunda e as rigorosas medidas de proteção planetária em vigor.
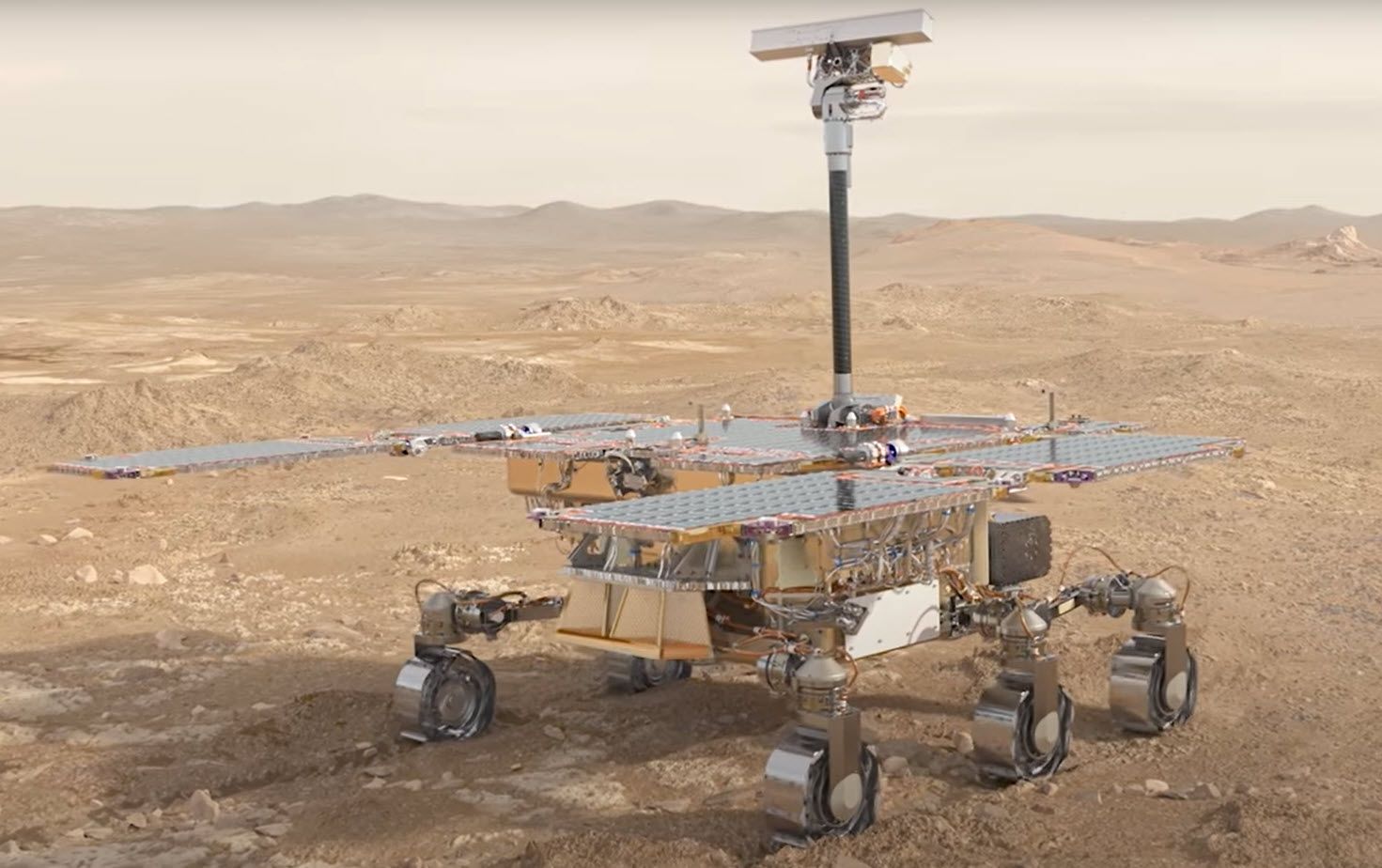
O rover Rosalind Franklin da ESA tem capacidades únicas de perfuração e um laboratório científico a bordo incomparável com qualquer outra missão em desenvolvimento.
Quando estiver explorando Marte, aqui na Terra teremos um rover gêmeo, chamado de Amalia. A ESA continua testando as capacidades do Amalia, e em um laboratório na Itália, ele chegou a perfurar uma profundidade de 1.7 metros o que é cerca de 25 vezes mais fundo do que qualquer outro rover já tentou perfurar em Marte. O rover também coletou amostras para análise sob o olhar atento de equipes científicas europeias.

Este foi o terceiro teste de perfuração profunda bem-sucedido na Terra para o laboratório europeu sobre rodas, uma operação crucial para responder à questão de saber se havia, ou há, vida no Planeta Vermelho.
Um ano se passou desde que o lançamento da missão do rover foi suspenso e depois cancelado, mas o trabalho não parou para as equipes da ExoMars na Europa.
Hoje a ESA, juntamente com parceiros internacionais e industriais, está reformulando a missão ExoMars Rosalind Franklin com novos elementos europeus e uma data prevista de 2028 para a viagem a Marte. Amalia , o modelo de teste do rover, não ficou ocioso ou longe de seu gêmeo. O rover Rosalind Franklin, aquele que voará para Marte, espera pacientemente na sala ultralimpa do Thales Alenia Space em Turim, Itália.
Totalmente representativo do que Rosalind fará no Planeta Vermelho, os engenheiros usaram o rover Amalia para explorar um simulador de terreno de Marte nas instalações do ALTEC em busca de um local de perfuração.
O rover Amalia teve tempo para perfurar um poço cheio de terra – sílica mole na superfície, seguida por camadas de areia e solo vulcânico fino, todas elas parecidas com o que Rosalind, o rover, poderia encontrar sob a superfície marciana.
No terceiro dia da escavação de teste, a broca se estendeu quase ao máximo e atingiu seu alvo – um mineral de gesso da região de Turim, comumente encontrado em depósitos sedimentares ligados à água.

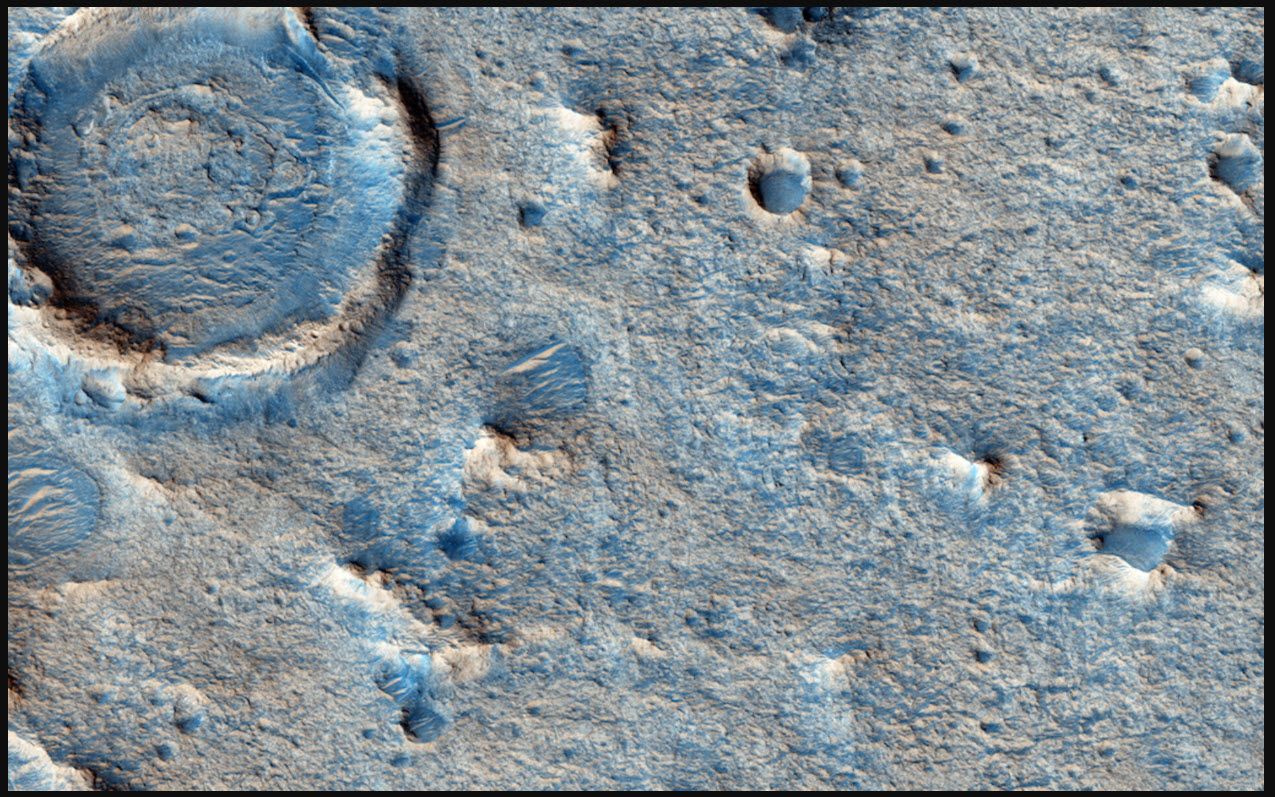
A descoberta foi relevante para a geologia de Marte porque o local de pouso do rover, Oxia Planum , é uma área onde os sedimentos podem preservar vestígios de um antigo ambiente marciano rico em água. Oxia Planum será o local de pouso geologicamente mais antigo visitado em Marte quando Rosalind Franklin pousar lá em 2030.
Os cientistas querem ir muito fundo para acessar o material orgânico bem preservado de quatro bilhões de anos atrás, quando as condições na superfície de Marte eram mais parecidas com as da Terra infantil e a área poderia ter hospedado microrganismos.
O recorde para o mais profundo que qualquer broca cavou e provou no Planeta Vermelho até hoje é de 7.1 cm, e atualmente pertence ao rover Perseverance da NASA .
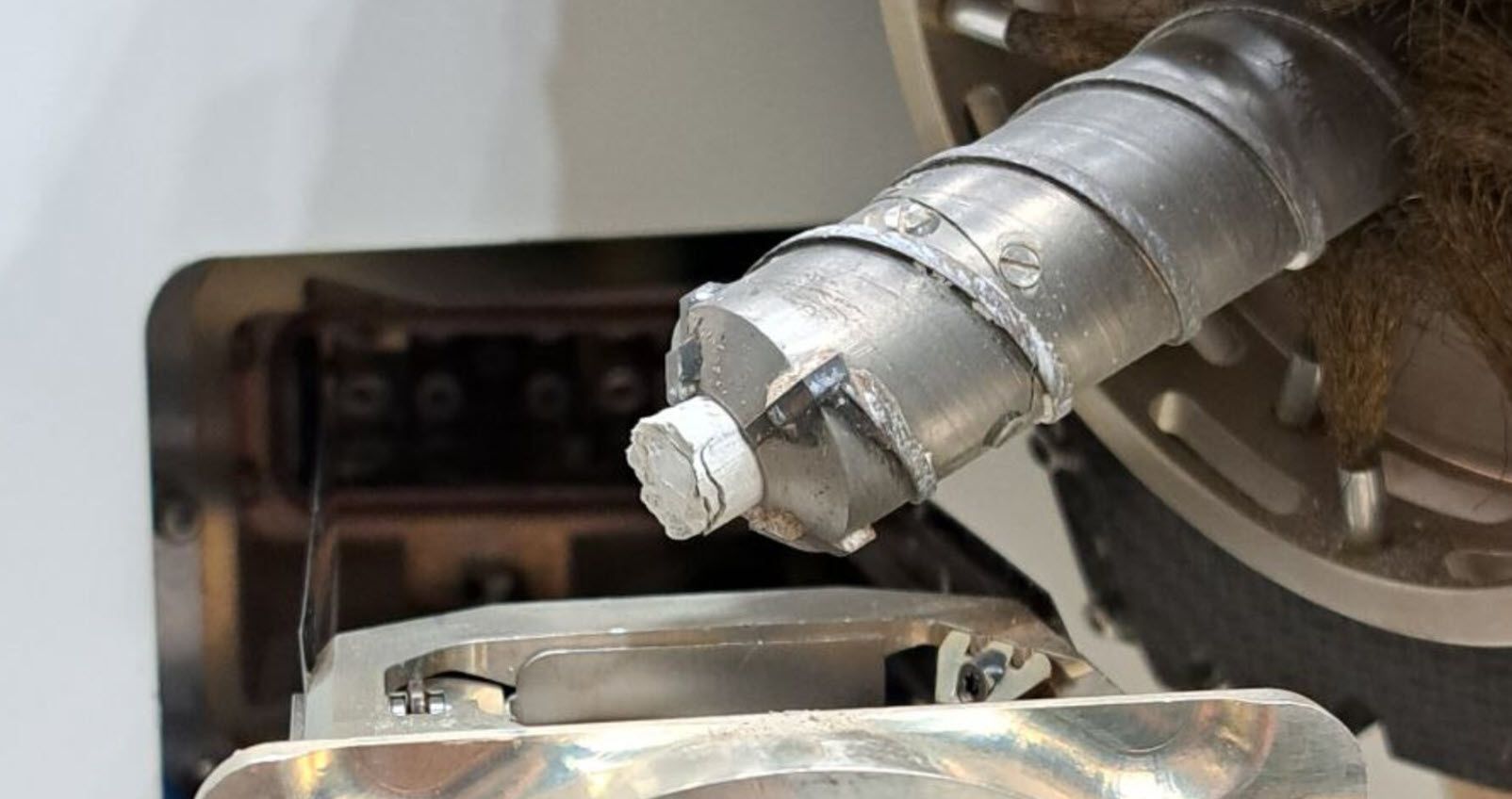
O teste em Turim com o rover Amalia foi considerado um sucesso quando, no quarto dia, a broca adquiriu uma amostra em forma de pellet de cerca de 1 cm de diâmetro e a entregou ao laboratório que fica dentro da barriga do rover.
Uma vez que a broca foi totalmente retraída, o pellet foi jogado em uma gaveta que retirou e transferiu a amostra para uma estação de trituração. O pó resultante será distribuído para fornos e recipientes para análise científica.
Toda a operação foi assistida pelos olhos do rover . A suíte Panoramic Camera, conhecida como PanCam, usou sua câmera de alta resolução para examinar de perto a textura da rocha e o tamanho do grão em cores.
Em Marte, esta câmera poderosa ajudará a investigar detalhes muito finos em afloramentos, rochas e solos à distância, encontrar os locais mais promissores para perfurar e, em seguida, tirar imagens de alta resolução das amostras no suporte do mecanismo de transferência de amostras do núcleo, antes de serem enviados para o laboratório do rover.
Ao mesmo tempo, o Close-Up Imager, CLUPI, montado na parte externa da própria broca, forneceu visualizações detalhadas da pilha de rejeitos de solo agitada pela ação de perfuração, bem como da amostra no suporte em seu caminho para o laboratório.
A aquisição confiável de amostras profundas preservadas do ambiente agressivo de radiação na superfície é a chave para o principal objetivo científico da ExoMars: investigar a composição química do solo e, com ela, possíveis sinais de vida.
A broca foi desenvolvida pela empresa italiana Leonardo , enquanto a Thales Alenia Space é a principal contratada da ExoMars.
Os dados provenientes da simulação de perfuração profunda em conjunto com os instrumentos científicos foram a linha de base para mais testes. A equipe científica na sala de controle recebeu uma mistura de dados do teste, dados simulados de outras amostras semelhantes a Marte e um conjunto de imagens da amostra e do local da perfuração.
Os cientistas enfrentaram o desafio de reagir rapidamente e elaborar um plano de atividades para o próximo sol, ou dia marciano, que seria enviado ao rover em Marte.
“Essas simulações são valiosas porque nos colocam no banco do motorista em um ambiente imersivo – para que possamos praticar e refinar como executaremos as operações do rover Rosalind Franklin”, explica Elliot Sefton-Nash, cientista do projeto ExoMars Rosalind Franklin Mission .
A ESA, juntamente com parceiros internacionais e industriais, está reformulando a Missão ExoMars Rosalind Franklin com novos elementos europeus, incluindo um módulo de pouso e uma data prevista de 2028 para a viagem a Marte.
A recém-formatada Missão Rosalind Franklin recuperará um dos objetivos originais da ExoMars – criar uma capacidade europeia independente para acessar a superfície de Marte com uma sofisticada carga robótica.
Fontes:
https://www.esa.int/ESA_Multimedia/Videos/2023/03/ExoMars_Back_on_track_for_the_Red_Planet

Comente!