
O nível em que a automação chegou transcendo o nosso planeta, e já pode ser visto em Marte. O rover Perseverance da NASA está justificando tudo que se falava sobre ele antes da missão, de que seria o rover mais autônomo já enviado para explorar Marte. Isso faz com que a gente possa imaginar o que vem pela frente em novas missões.
Atualmente, o rover Perseverance da NASA se encontra num local chamado de Hawksbill Gap, fazendo observações de pequenas porções de camadas de rocha, que faz parte do processo usado pelo rover para escolher qual será a próxima rocha a ser amostrada. Na semana de 15 a 21 de maio de 2022, o rover caminhou 400 metros em Marte e com isso, desde o dia em que pousou já percorreu 11.8 km dentro da Cratera Jezero.
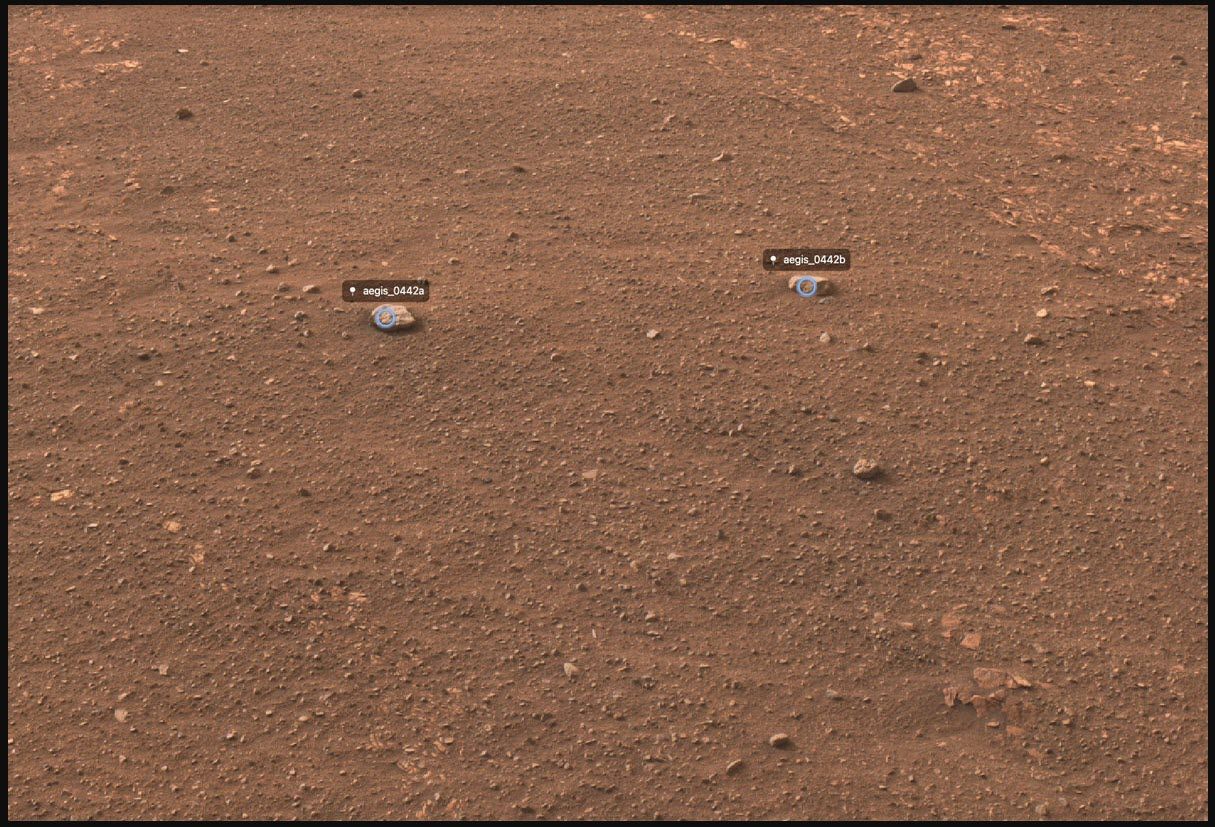
Mas o que marcou recentemente as atividades do Perseverance em Marte, é que foi o próprio rover que escolheu e atirou o laser da sua SuperCam em dois alvos no Sol 442. Normalmente, até agora, era a equipe em Terra que selecionava os alvos, mas esse era um processo demorado, então o rover fotografava, as fotos eram enviadas e só no dia seguinte, o alvo seria selecionado. Agora não, com essa capacidade de escolher seu próprio alvo logo em seguida o próprio Perseverance já atira o seu laser nele para fazer as análises necessárias.
Isso é muito importante, pois agiliza muito o trabalho de todos. E ter os resultados da SuperCam de forma quase que imediata pode alertar as equipes em Terra sobre composições pouco comuns das rochas o que dá tempo da equipe tomar decisões sobre análises adicionais antes que o rover continue sua jornada.

Para fazer isso, o Perseverance usa um pacote de software que permite a seleção de alvos e que é chamado de Autonomous Exploration for Gathering Increased Science, ou AEGIS, e foi desenvolvido pelo pessoal do JPL para missões de rovers anteriores e que foi adaptado para a SuperCam do Perseverance. O AEGIS precisa de imagens feitas pela NavCam, então, ele analisa as imagens para encontrar rochas e priorizá-las para análises, isso é feito com base no tamanho, brilho e em outras características. Depois disso se inicia uma sequência de processos onde a SuperCam atira seu laser para determinar a composição química de um ou de dois alvos mais prioritários selecionados com base nas imagens da NavCam.
O teste do AEGIS começou em março onde foram usadas imagens coletadas pelo SuperCam Remote Micro-Imager, ou RMI, mas nesses testes iniciais não foi atirado o laser para as análises químicas. Depois de pesquisar por alguns parâmetros em testes sucessivos, o laser foi usado pelo AEGIS com sucesso, na última semana. As imagens de acompanhamento mostram que as rochas foram selecionadas e atiradas. As imagens com o RMI foram então feitas depois do laser ter sido usado para comprovar onde o laser acertou as rochas. Com esse teste bem sucedido, a equipe do Perseverance pretende agora usar o AEGIS com mais frequência, para agilizar todo o processo realizado pelo rover em Marte, adquirindo dados de forma mais veloz e tomando decisões mais ágeis. Vamos acompanhando, esse verdadeiro robô que temos hoje em Marte.
Fonte:
https://mars.nasa.gov/mars2020/mission/status/383/perseverance-now-selects-its-own-targets-to-zap/

Comente!