
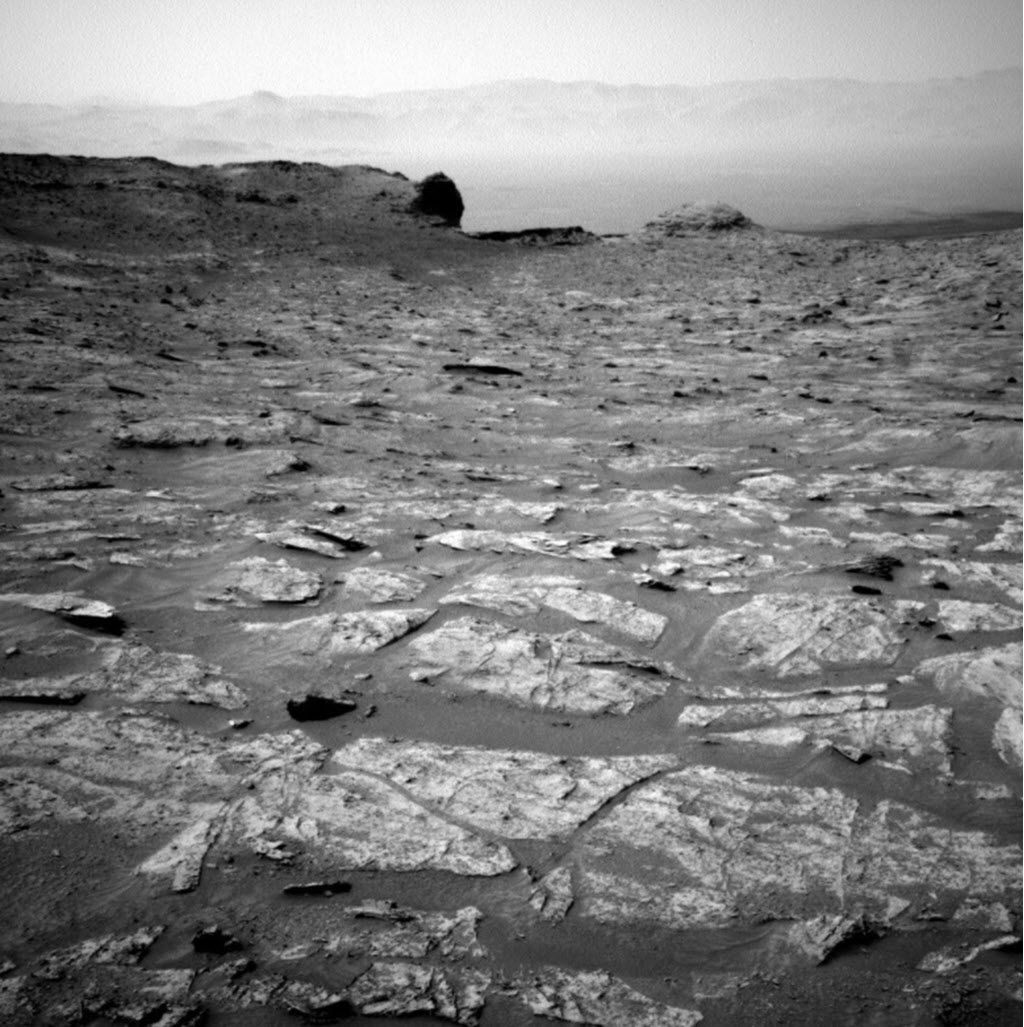
O Curiosity despertou em um novo quadrante de mapeamento, chamado, Roraima. O quadrante de Roraima tem esse nome em homenagem ao estado mais setentrional do Brasil e do Monte Roraima, que é o pico mais alto das montanhas de Pakaraima, que fica entre o Brasil, a Venezuela e a Guiana. O terreno na região de Roraima na Terra se parece um pouco com a área em que Curiosity está – com colinas de topo plano e algumas encostas íngremes. O Curiosity estará indo em direção a uma passagem estreita cercada por algumas pequenas mesas de topo plano dignas do nome de Roraima. Olhando para trás, o Curiosity pode ver todo o caminho até o quadrante Torridon e ver as “terras altas escocesas” de Marte com a bela vista anexa do entalhe de Marie Gordon; você também pode ver a borda da cratera Gale à distância.
À medida que avançamos para o sul, provavelmente estacionaremos perto de algumas dessas colinas e penhascos altos para obter imagens em close. Estacionar perto de um terreno tão alto às vezes pode bloquear nossa visão dos orbitadores se eles estiverem baixos no céu, afetando a quantidade de dados que podemos receber. Vimos esse tipo de efeito quando estacionamos perto do penhasco alto e íngreme do entalhe Marie Gordon, onde houve uma redução significativa de dados em um de nossos passes de comunicação com o Trace Gas Orbiter (TGO). Levaremos isso em consideração para garantir que ainda obteremos os dados de que precisamos para o planejamento.
A primeira atividade incluiu um touch and go, que inclui alguma ciência de contato, ciência direcionada e um passeio. Nosso alvo de ciência de contato, “Verde”, é um pequeno pedaço de rocha com nódulos, semelhante a muitas das outras rochas que investigamos recentemente. A equipe científica será capaz de comparar sua composição com os alvos anteriores para continuar a construir uma imagem das mudanças geológicas e químicas preservadas na região. Os planejadores do rover deixarão o braço retraído novamente em preparação para a direção e para deixar uma visão clara do alvo para as câmeras.
A ciência alvo do plano também investigará os nódulos olhando para “Maurak”, outro alvo próximo, com ChemCam e Mastcam. ChemCam também está tirando imagens RMI de um monte distante chamado “Mirador”, tanto seu topo quanto sua face, que tem uma transição textural interessante e significativa.
Quando estiver pronto para partir, o Curiosity seguirá cerca de 15 m para o sul. Devido a algumas rochas significativas e a subida íngreme à nossa frente, isso é apenas até onde os planejadores do Rover podem ver. Mesmo nessa distância, o rover precisará girar para contornar algumas rochas mais significativas, de modo que não adicionemos danos às rodas. O drive deve nos deixar estacionados de onde possamos ter uma melhor visão da estrada à frente, bem como deixar o alicerce dentro da área de trabalho do veículo espacial para o próximo plano.
Após a viagem, Curiosity fará algumas observações ambientais noturnas, Navcam suprahorizon e filmes zenith, para observar a atmosfera. Durante a noite, o instrumento SAM fará uma atividade de manutenção de engenharia para verificar a ótica do espectrômetro de laser sintonizável (TLS).
No segundo dia do plano, após o drive, o Curiosity fará alguma ciência não direcionada usando a seleção e observação de alvos autônomos AEGIS e um longo filme de dust devil pela Navcam.
Fonte:
https://mars.nasa.gov/msl/mission-updates/9106/sols-3347-3348-bem-vindo-a-roraima/


Comente!