
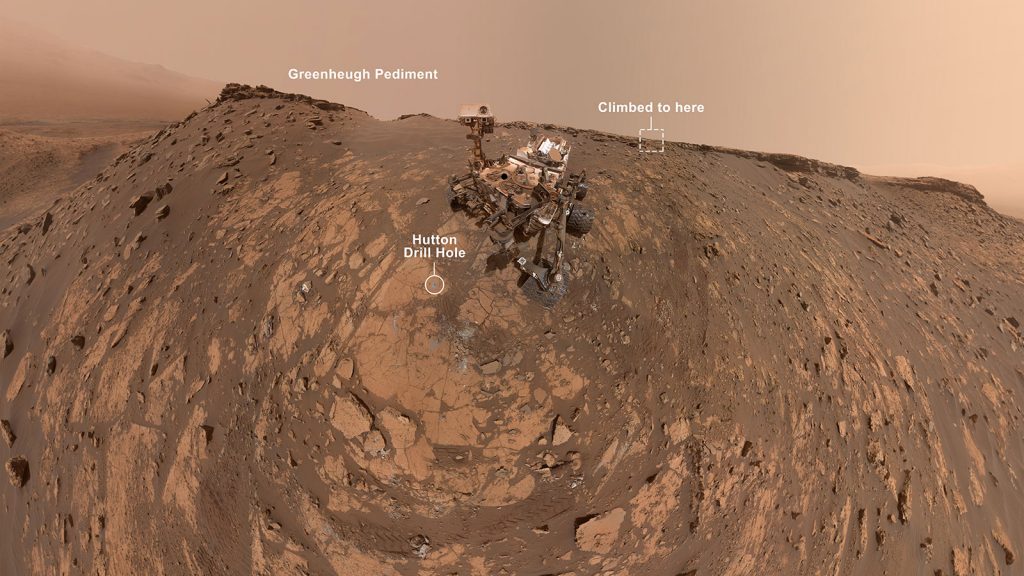
O rover Curiosity da NASA recentemente escalou a colina mais íngreme na sua história, e chegou na crista do chamado Greenheugh Pediment, uma vasta camada de rocha localizada no topo dessa colina. Mas antes de fazer essa escalada inédita, o rover resolveu fazer uma selfie, registrando a cena logo abaixo da colina.
NA frente do rover é possível ver um pequeno buraco, esse buraco foi perfurado pelo próprio Curiosity enquanto estava coletando amostras de um alvo denominado de Hutton. A selfie inteira é uma imagem panorâmica de 360 graus, que foi feita a partir de 86 imagens realizadas pelo rover. A imagem mostra o rover a cerca de 3.4 metros abaixo da colina que eles estava prestes a escalar.
No dia 6 de março de 2020, o rover chegou no topo da colina, durante o seu dia de trabalho em Marte, ou sol, de número 2696. Ele precisou de 3 jornadas para escalar a colina, sendo que na segunda perna da escalada o rover ficou inclinado em 31 graus, essa foi a maior inclinação que o Curiosity já teve em Marte e perde somente para o Opportunity que em 2016 ao subir uma colina se inclinou em 32 graus. A selfie foi feita pelo Curiosity no dia 26 de fevereiro de 2020, no Sol número 2687.
Desde 2014, o Curiosity vem subindo o Monte Sharp, uma montanha de 5 km de altura no centro da Cratera Gale. Os operadores do rover que ficam no Jet Propulsion Laboratory da NASA no sul da Califórnia, mapeiam com cuidado cada movimento que o rover irá fazer, para garantir a sua segurança. O rover nunca esteve em perigo de virar, ao tentar subir essa colina com essa inclinação, na verdade o seu sistema de suspensão, permite que ele escale colinas com até 45 graus de inclinação, mas o problema é o terreno, e uma escalada com esse grau de inclinação, pode fazer com que suas rodas, girem em falso, ou fiquem presas em alguma rocha.
Muita gente pergunta como as selfies são feitas. Pois bem, antes da escalada, o Curiosity usou as chamadas NAvigation Cameras, que fazem imagens em preto e branco e que ficam localizadas no se mastro, para, pela primeira vez fazer um pequeno vídeo, do seu “pau de selfie”, ou do braço robótico, e assim todos podem entender como as selfies são feitas.
A missão do Curiosity é estudar se o ambiente marciano em algum momento da sua história de bilhões de anos poderia ter suportado a vida. Uma ferramenta usada para isso é a chamada Mars Hand Lens Camera, ou MAHLI, essa câmera fica localizada na torre de instrumento na ponta final do braço robótico. Essa câmera fornece imagens detalhadas dos grãos de areia e da textura das rochas, algo parecido com o que os geólogos fazem aqui na Terra, quando usam uma lupa para analisar melhor as rochas.
Rodando a torre de instrumentos e apontando ela para o rover, a equipe pode usar a MAHLI para mostrar o Curiosity ao invés de mostrar rochas. Como cada imagem feita pela MAHLI cobre uma pequena área, são necessárias muitas imagens e mudar muitas vezes o braço robótico de posição para que se possa registrar o rover completamente e o local onde ele está.
Os próprios operadores do Curiosity recebem essa pergunta muitas vezes, então eles pensaram assim, melhor a gente deixar o próprio rover explicar como as selfies são feitas, assim não fica dúvida alguma.
Fonte:
https://www.nasa.gov/feature/jpl/nasas-curiosity-mars-rover-takes-a-new-selfie-before-record-climb



Comente!