

Como a eletricidade estática em regiões de escuridão eterna pode reduzir a exploração a um ritmo mais lento que o de um caracol, e as soluções de engenharia para superar este obstáculo.
Introdução: A Ameaça Silenciosa da Eletricidade Estática no Espaço
A exploração da Lua, impulsionada pelo ambicioso Programa Artemis da NASA, está em um ponto de inflexão histórico. O objetivo transcende as missões de curta duração que marcaram a era Apollo; a meta agora é estabelecer uma presença humana sustentável e de longo prazo em nosso satélite natural [1]. Essa nova fronteira depende criticamente do uso intensivo de veículos robóticos e tripulados, os rovers, para construção, transporte e prospecção de recursos. Contudo, um inimigo invisível e onipresente no ambiente lunar — a eletricidade estática — ameaça impor uma restrição de mobilidade tão severa que poderia reduzir a exploração a um ritmo de lesma: meros 0,2 centímetros por segundo.
A eletricidade estática, ou triboeletricidade, é um fenômeno familiar na Terra, manifestando-se em pequenos choques ao tocar uma maçaneta após caminhar sobre um carpete. Na Lua, esse fenômeno é drasticamente amplificado. A poeira lunar, conhecida como rególito, é extremamente abrasiva e eletricamente carregada. O simples ato de um rover rolar sobre essa superfície gera uma carga elétrica massiva, um processo conhecido como tribocharging [2].
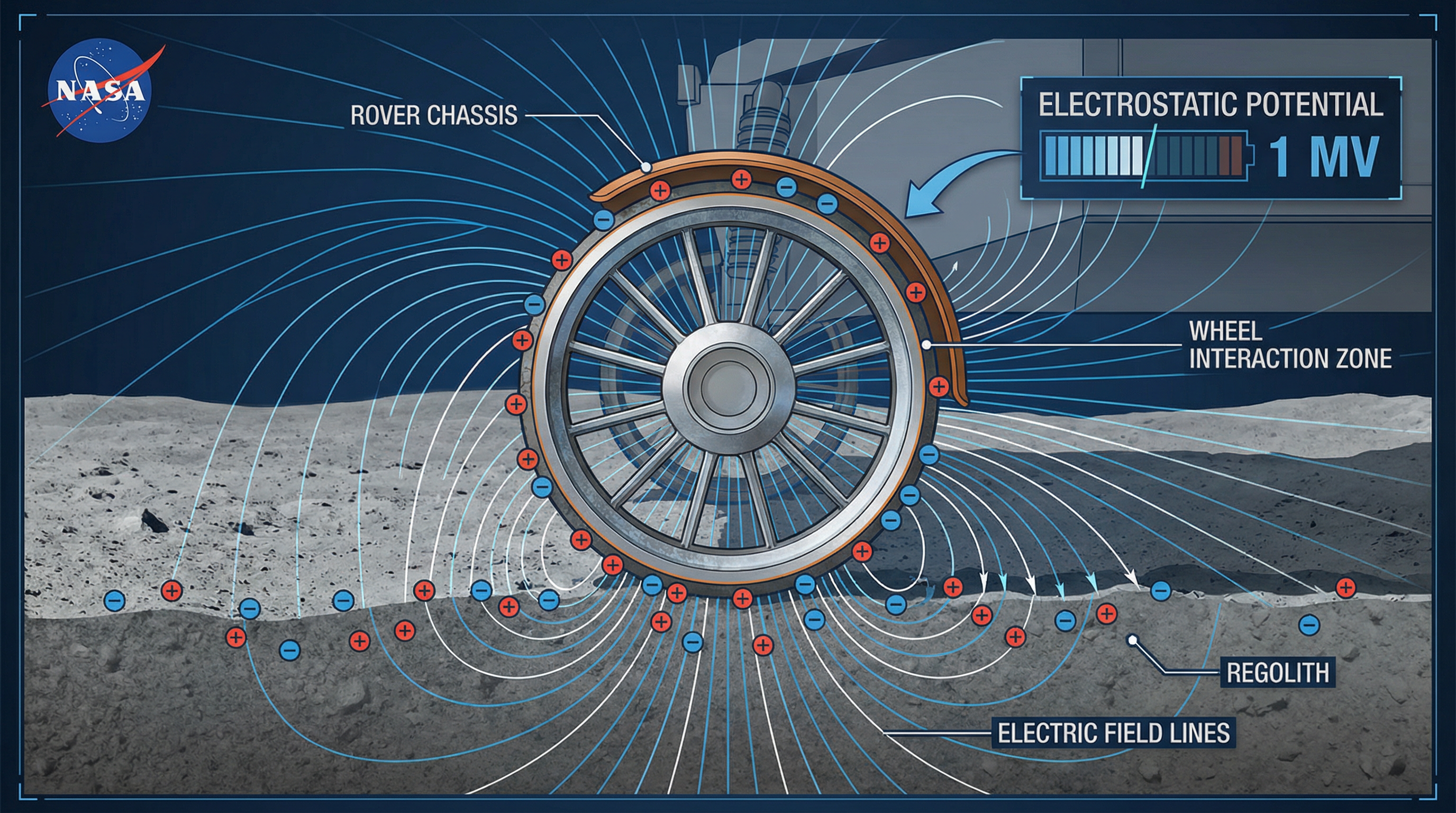
Um estudo seminal de W.M. Farrell, do Space Science Institute, e M.I. Zimmerman, da Johns Hopkins University, publicado na revista Advances in Space Research, modelou esse acúmulo de carga e chegou a uma conclusão alarmante: em certas regiões da Lua, a carga pode atingir a marca de 1 Megavolt (MV). Tal potencial elétrico não é apenas uma inconveniência; ele representa um risco existencial para a eletrônica sensível dos rovers e, crucialmente, para os trajes espaciais dos astronautas, podendo causar um arco elétrico (descarga elétrica de alta potência) capaz de fritar sistemas de suporte à vida [3].
A boa notícia é que, em grande parte da superfície lunar iluminada, a natureza oferece um mecanismo de dissipação. A notícia ruim, e o foco deste artigo, é que esse mecanismo falha miseravelmente nas Regiões Permanentemente Sombreadas (RPSs), os locais mais estratégicos para a busca por gelo de água. É nessas áreas de escuridão eterna que a ciência impõe o limite de velocidade de 0,2 cm/s, forçando engenheiros a buscar soluções criativas para evitar que a exploração lunar seja paralisada por um choque elétrico.
Este artigo se aprofundará na física por trás desse problema, explorará o modelo científico que o quantificou, analisará as consequências para missões como a do rover VIPER e detalhará as soluções de engenharia propostas para garantir que a próxima geração de exploradores lunares possa se mover com a velocidade e segurança necessárias para desvendar os segredos mais bem guardados da Lua.
A Dança Eletrostática na Lua: Tribocharging e Rególito
Para entender a magnitude do problema, é essencial compreender as propriedades únicas do ambiente lunar e o mecanismo físico do tribocharging.
O Rególito Lunar: Mais que Poeira
O rególito lunar não é como a poeira terrestre. É composto por partículas finas, mas extremamente angulares e abrasivas, formadas pelo constante bombardeio de micrometeoritos ao longo de bilhões de anos. A ausência de atmosfera e de erosão hídrica significa que essas partículas mantêm bordas afiadas como vidro quebrado, tornando-as altamente reativas e propensas a interações eletrostáticas [4]. Sua composição é rica em silicatos e óxidos metálicos, materiais que possuem propriedades dielétricas (isolantes) ou semicondutoras, facilitando o acúmulo de carga.
O tribocharging ocorre quando dois materiais diferentes entram em contato e são separados, resultando na transferência de elétrons de um para o outro. No caso de um rover, o atrito constante entre o material da roda (geralmente um metal condutor ou uma liga) e o rególito lunar causa uma separação de carga. A posição relativa dos materiais na chamada série triboelétrica determina a direção da transferência de elétrons. Estudos de laboratório com simulantes de rególito lunar indicam que o rególito tende a adquirir uma carga negativa, enquanto a roda do rover acumula uma carga de polaridade oposta, dependendo da composição exata dos materiais e das condições locais [5].
A magnitude da carga acumulada é diretamente proporcional à área de contato e à velocidade do movimento. Em um ambiente terrestre, a umidade do ar e a condutividade da atmosfera dissipam rapidamente essa carga. Na Lua, que é um vácuo quase perfeito e um ambiente extremamente seco, a carga não tem para onde ir. Ela se acumula na superfície do rover, especialmente nas rodas, até atingir potenciais perigosamente altos.
O Plasma Lunar e a Dissipação Natural
A Lua não está eletricamente isolada no espaço; ela está imersa no plasma do vento solar. O plasma é o quarto estado da matéria, um gás ionizado composto por prótons, elétrons e íons. Este plasma interage com a superfície lunar, e essa interação é o principal mecanismo de dissipação de carga em áreas iluminadas.
Em condições normais, a superfície lunar iluminada pelo Sol atinge um equilíbrio de carga através de dois processos principais:
- Fotoemissão: A luz ultravioleta (UV) do Sol atinge a superfície do rególito e do rover, ejetando elétrons (o efeito fotoelétrico). Isso faz com que a superfície iluminada adquira uma carga positiva, atraindo elétrons do plasma circundante.
- Fluxo de Plasma: O vento solar, um fluxo contínuo de partículas carregadas, bombardeia a superfície. Em áreas iluminadas, o potencial positivo criado pela fotoemissão atrai os elétrons do plasma, enquanto repele os prótons, criando um ciclo de neutralização.
Esse fluxo constante de partículas do plasma, juntamente com a fotoemissão, atua como um “curto-circuito” natural, impedindo que a carga gerada pelo tribocharging atinja níveis críticos. É por isso que os rovers das missões Apollo, que operaram exclusivamente em áreas iluminadas, não enfrentaram problemas de eletricidade estática catastróficos, apesar de atingirem velocidades consideráveis (o Apollo 17, por exemplo, chegou a 18 km/h) [6].
O Desafio das Regiões de Sombra Eterna (RPSs)
O cenário muda drasticamente nas Regiões Permanentemente Sombreadas (RPSs), localizadas principalmente nas crateras polares da Lua. Estes locais, de imenso interesse científico e estratégico, representam um dos ambientes mais hostis do Sistema Solar e o epicentro do problema da eletricidade estática.
O Ambiente Extremo das RPSs
As RPSs são áreas onde o Sol nunca nasce. Devido à pequena inclinação axial da Lua (apenas 1,54 graus, em comparação com os 23,5 graus da Terra) e à topografia das crateras profundas nos polos, a luz solar direta jamais atinge o solo dessas regiões. Isso cria um ambiente único e extremo, definido por três características principais:
- Frio Extremo: As temperaturas nas RPSs podem cair para cerca de -240 °C (33 Kelvin), tornando-as algumas das regiões mais frias do Sistema Solar, mais frias até que a superfície de Plutão. Este frio criogênico é um desafio formidável para a sobrevivência de qualquer equipamento eletrônico ou mecânico.
- Gelo de Água: O frio extremo atua como uma “armadilha fria” (cold trap) perfeita. Ao longo de bilhões de anos, moléculas de água e outros compostos voláteis (como metano e amônia), depositados por cometas e asteroides, condensaram-se e permaneceram estáveis na forma de gelo. A presença confirmada de vastos depósitos de gelo de água torna as RPSs o principal alvo da exploração futura. Este gelo pode ser extraído para fornecer água potável e ar respirável para os astronautas e, mais importante, pode ser decomposto em hidrogênio e oxigênio, os componentes primários do combustível de foguete. A capacidade de “viver da terra” e reabastecer foguetes na Lua (In-Situ Resource Utilization – ISRU) é considerada a chave para uma economia espacial sustentável e para futuras missões a Marte.
- Ausência de Fotoemissão: A falta de luz solar direta significa que o mecanismo de dissipação de carga por fotoemissão, tão eficaz nas áreas iluminadas, é completamente inoperante. A escuridão é total e perpétua.
A Falha da Dissipação de Carga
Nas RPSs, a única forma de dissipação de carga é através do fluxo de plasma do vento solar que consegue “vazar” para dentro das crateras. No entanto, o ambiente de plasma dentro dessas regiões topograficamente complexas é, na maioria das vezes, esgotado (plasma-starved). As paredes da cratera bloqueiam a maior parte do fluxo direto do vento solar, criando uma “sombra de plasma” ou uma região de esteira (wake region) onde a densidade de partículas carregadas é ordens de magnitude menor do que na superfície exposta.
O modelo de Farrell e Zimmerman se concentra exatamente neste cenário: um rover condutor rolando sobre o rególito em uma RPS. O tribocharging continua a gerar carga elétrica na roda a cada rotação, mas a taxa de dissipação pelo plasma rarefeito é extremamente baixa. O resultado é um desequilíbrio perigoso: a corrente de tribocharging (a taxa de acúmulo de carga) supera em muito a corrente de dissipação de plasma (a taxa de neutralização de carga).
A corrente de dissipação de plasma, por sua vez, depende da densidade de elétrons e íons no plasma local e do potencial elétrico da roda. O ponto crítico é a velocidade limite (threshold velocity): a velocidade máxima na qual a corrente de tribocharging é igual à corrente de dissipação. Se o rover exceder essa velocidade, a carga líquida no sistema começa a acumular-se, teoricamente de forma exponencial, até que um evento de descarga ocorra.
O Modelo de Farrell e Zimmerman: A Física do Limite
O trabalho de Farrell e Zimmerman foi pioneiro não apenas por identificar o problema, mas por quantificá-lo, fornecendo aos engenheiros espaciais um número concreto e alarmante para a restrição de velocidade, transformando uma preocupação teórica em um desafio de engenharia tangível.
A Derivação do Limite de 0,2 cm/s
Ao aplicar seu modelo a um cenário simulado de uma cratera polar, onde o fluxo de plasma é mínimo devido à sombra topográfica, os pesquisadores calcularam a velocidade limite. O resultado, publicado em seu artigo, é surpreendente e profundamente desanimador para as perspectivas de exploração rápida:
“Descobrimos que, dentro de crateras polares com plasma esgotado, as velocidades das rodas devem permanecer abaixo de 2 x 10⁻³ m/s para garantir que a dissipação de plasma da roda seja comparável ao acúmulo de tribocarga do rególito.” [3]
Convertendo 2 x 10⁻³ metros por segundo, chegamos ao valor de 0,2 centímetros por segundo. Para colocar essa velocidade em uma perspectiva terrestre, um caracol de jardim comum se move a uma velocidade média de 1,3 cm/s. O rover lunar ideal, segundo este modelo, teria que se mover mais de seis vezes mais devagar que um caracol para operar com segurança em uma RPS. Uma missão de exploração que deveria durar dias poderia se estender por semanas ou meses, comprometendo drasticamente a quantidade de ciência que poderia ser realizada dentro da vida útil limitada do rover.
O Potencial de 1 Megavolt e o Risco de Arco Elétrico
A consequência de exceder essa velocidade ínfima é o acúmulo rápido e descontrolado de potencial elétrico. O estudo estima que, em casos de movimento contínuo acima da velocidade limite em um ambiente de plasma particularmente rarefeito, o potencial na superfície do rover pode chegar a 1 Megavolt (1.000.000 Volts). Esse nível de tensão é comparável ao de linhas de transmissão de energia de alta tensão na Terra e representa uma fonte de energia perigosíssima em um ambiente não controlado.
| Potencial Elétrico | Comparação Terrestre | Risco no Ambiente Lunar |
|---|---|---|
| 100 Volts | Tomada doméstica | Suficiente para causar adesão severa de poeira lunar, cobrindo superfícies. |
| 10.000 Volts (10 kV) | Eletricidade estática de um balão | Potencial para pequenos arcos elétricos, interferência eletromagnética (EMI). |
| 1.000.000 Volts (1 MV) | Linha de transmissão de alta tensão | Arco Elétrico Miniaturizado (Miniaturized Arc Flash) com energia suficiente para danificar permanentemente eletrônicos e perfurar trajes espaciais. |
O risco mais grave associado a esse potencial é o arco elétrico. Quando a diferença de potencial entre a roda carregada e outra parte do rover (ou o traje de um astronauta que o toque) excede a rigidez dielétrica do vácuo ou dos materiais isolantes, a energia acumulada é liberada instantaneamente em um flash de plasma. Para um rover, isso pode significar a falha catastrófica de sistemas críticos, como o sistema de navegação, o trem de força elétrico ou os computadores de bordo. Para um astronauta, um arco elétrico próximo a um sistema de suporte à vida não é apenas um risco de missão; é um risco de vida.
As Consequências de um Megavolt: Riscos para Rovers e Astronautas
O problema do tribocharging e do potencial de 1 Megavolt não é uma mera curiosidade acadêmica; ele se traduz em implicações práticas e de segurança de missão de primeira ordem, afetando tanto os equipamentos robóticos quanto a vida dos futuros exploradores lunares.
Danos à Eletrônica e Sistemas de Navegação
Rovers modernos, como o futuro VIPER (Volatiles Investigating Polar Exploration Rover) da NASA, são maravilhas da engenharia, repletos de eletrônicos sofisticados para navegação autônoma, comunicação com a Terra e operação de instrumentos científicos de alta precisão. Este complexo sistema é particularmente vulnerável aos efeitos da eletricidade estática.
- Interferência Eletromagnética (EMI): O acúmulo de carga e, mais ainda, as descargas súbitas (arcos elétricos) geram um intenso ruído eletromagnético em uma ampla faixa de frequências. Essa EMI pode corromper dados, interferir nos sinais de comunicação com satélites em órbita ou com a Terra e, crucialmente, perturbar os sensores de navegação, como unidades de medição inercial (IMUs) e rastreadores de estrelas, levando o rover a se perder.
- Falha de Componentes: Um arco elétrico de alta energia pode ser fatal para a eletrônica. A descarga pode induzir correntes e tensões que excedem em muito os limites de tolerância de microchips, transistores e outros componentes semicondutores, causando a queima e a falha permanente. Um único evento de descarga no local errado poderia inutilizar um instrumento científico de milhões de dólares ou paralisar completamente o rover.
- Adesão de Poeira: A poeira lunar, além de abrasiva, é eletricamente carregada e se comporta como um aerossol pegajoso em um ambiente eletrostático. Um rover com alto potencial elétrico atrai e retém essa poeira de forma agressiva. A poeira adere a praticamente tudo, com consequências graves: pode cobrir painéis solares, reduzindo drasticamente a geração de energia; pode cegar lentes de câmeras e espectrômetros; e pode infiltrar-se em juntas móveis, engrenagens e rolamentos, causando um desgaste acelerado e falhas mecânicas.
Ameaça à Segurança Humana
O risco mais crítico e inaceitável reside na interação com os astronautas. O Programa Artemis prevê que os astronautas desçam às RPSs para coletar amostras de gelo, instalar equipamentos e trabalhar em conjunto com os rovers. Nesse cenário, um rover carregado se torna uma armadilha mortal.
- Risco de Choque no Traje: Se um astronauta, cujo traje espacial está em um potencial elétrico diferente, tocar em um rover carregado com 1 MV, a descarga elétrica buscará o caminho de menor resistência, que pode ser através do traje. Embora os trajes espaciais sejam projetados para serem robustos e isolantes, a energia de um arco elétrico dessa magnitude pode perfurar o material, danificar a fiação interna dos sistemas de comunicação e monitoramento biomédico ou, na pior das hipóteses, comprometer o sistema de pressurização e suporte à vida. Um pequeno buraco em um traje pressurizado no vácuo do espaço é um evento fatal.
- Contaminação do Habitat: A poeira carregada que adere ao traje do astronauta durante uma atividade extraveicular (EVA) é inevitavelmente trazida para dentro do habitat lunar ou do veículo de ascensão. Essa poeira, composta por partículas afiadas como vidro, é tóxica se inalada e pode causar problemas respiratórios graves (uma condição que já preocupa a NASA, conhecida como “febre do feno lunar”). Além disso, a poeira pode danificar equipamentos sensíveis dentro do habitat, como computadores e sistemas de purificação de ar.
O problema da eletricidade estática é, portanto, um desafio de engenharia de sistemas multifacetado que deve ser resolvido de forma robusta e confiável antes que a exploração humana das RPSs possa ocorrer com segurança.
Estratégias de Mitigação: Engenharia Contra a Eletricidade Estática
Felizmente, o mesmo estudo que identificou o severo limite de velocidade também abriu caminho para a solução. A comunidade de engenharia espacial, alertada pelo trabalho de Farrell e Zimmerman, está desenvolvendo uma série de estratégias de mitigação, que vão desde alterações no design dos rovers até táticas operacionais inteligentes. A solução não será uma única “bala de prata”, mas sim uma combinação de múltiplas camadas de defesa para domar a ameaça eletrostática.
1. Acoplamento Condutivo das Rodas ao Chassi
Uma das recomendações mais importantes e, à primeira vista, contraintuitivas, é garantir que as rodas sejam eletricamente ligadas (acopladas condutivamente) ao corpo principal do rover. Em vez de isolar a fonte de carga (as rodas), a ideia é espalhar essa carga por toda a superfície do veículo.
- Princípio: Ao conectar as rodas ao chassi, a área de superfície total do rover se torna uma única entidade elétrica. Isso aumenta drasticamente a área de coleta de plasma e a capacitância total do sistema. Uma área maior pode interceptar mais partículas do plasma ambiente, mesmo que rarefeito, aumentando a corrente de dissipação ($I_{diss}$). Além disso, uma capacitância maior significa que o sistema pode armazenar mais carga para um dado nível de tensão (V = Q/C). Em outras palavras, o rover levaria muito mais tempo para atingir o perigoso potencial de 1 MV, dando mais margem para a dissipação natural e para outras estratégias de mitigação funcionarem.
2. Escolha de Materiais e Design de Rodas
A geração de carga triboelétrica depende fundamentalmente dos materiais em contato. A engenharia de materiais oferece uma via promissora para minimizar a causa raiz do problema.
- Polaridade da Carga e a Série Triboelétrica: O rególito lunar, como vimos, tende a adquirir uma carga negativa. A série triboelétrica é um ranking de materiais que indica qual se tornará positivo e qual se tornará negativo após o contato. Se as rodas do rover puderem ser feitas de um material que, em contato com o rególito, também adquira uma carga negativa (ou uma carga positiva muito fraca), a diferença de potencial e a transferência de carga seriam minimizadas. A pesquisa agora se concentra em testar ligas metálicas e compósitos avançados em câmaras de vácuo com simulantes de rególito para encontrar a combinação ideal que reduza a eficiência do tribocharging.
- Redução do Contato: O design da roda pode ser otimizado para minimizar a área de contato ou a frequência de atrito. No entanto, essa é uma solução complexa, pois qualquer alteração que reduza o contato pode comprometer a tração e a capacidade do rover de navegar em terrenos arenosos e inclinados, que são comuns na Lua.
3. Dissipação Ativa: Recriando a Luz do Sol na Escuridão
Se a natureza não fornece um mecanismo de dissipação eficaz nas RPSs, a engenharia pode criá-lo artificialmente. As estratégias de dissipação ativa são as mais promissoras para permitir velocidades de exploração mais altas.
- Lâmpadas UV: A proposta mais elegante é instalar lâmpadas de luz ultravioleta (UV) no rover, direcionadas para as rodas e para o rególito ao redor. A luz UV induziria a fotoemissão artificial, ejetando elétrons das superfícies e neutralizando a carga acumulada, replicando o efeito do Sol mesmo na escuridão total das RPSs. Esta solução é eficaz, mas adiciona consumo de energia e complexidade ao sistema, exigindo lâmpadas robustas que possam operar em temperaturas criogênicas.
- Feixes de Elétrons (E-beams): Outra solução ativa, ainda mais potente, seria o uso de pequenos emissores de feixes de elétrons (e-beam emitters). Esses dispositivos poderiam “pulverizar” ativamente a superfície do rover com elétrons de baixa energia para neutralizar o acúmulo de carga positiva. Esta tecnologia é altamente controlável, mas também consome mais energia e representa uma fonte de radiação que precisa ser cuidadosamente gerenciada para não interferir com os instrumentos científicos.
4. Estratégias de Rota e Operação
Além das soluções de hardware, o planejamento da missão e as estratégias operacionais podem desempenhar um papel crucial na gestão da carga eletrostática.
- Entrada pelo Lado “a Barlavento”: O estudo de Farrell e Zimmerman sugere que, ao entrar em uma cratera polar, o rover deve fazê-lo pelo lado que está voltado para o fluxo do vento solar (o lado “a barlavento” ou windward). Embora o fundo da cratera seja sombreado, o fluxo de plasma é desviado pela topografia e tende a penetrar mais profundamente no lado de entrada. Operar nessa região por mais tempo pode maximizar a dissipação de carga antes de se aventurar nas áreas mais profundas e esgotadas de plasma.
- Paradas Programadas para “Descarregar”: Uma estratégia simples e eficaz é o “parar e esperar”. O rover pode ser programado para fazer paradas regulares e prolongadas. Durante a parada, a corrente de tribocharging ($I_{tr}$) é zero, permitindo que a corrente de dissipação de plasma ($I_{diss}$), mesmo que lenta, tenha tempo para reduzir o potencial elétrico acumulado. O rover poderia, assim, alternar entre períodos de movimento e períodos de “descarga” para manter seu potencial elétrico sempre abaixo de um limiar de segurança.
O Futuro da Mobilidade Lunar e o Legado do VIPER
O problema do limite de velocidade de 0,2 cm/s é um lembrete vívido de que a Lua, apesar de sua aparente quietude, é um ambiente dinâmico e hostil, onde a física fundamental apresenta desafios de engenharia em cada cratera e grão de poeira. A superação desse obstáculo é fundamental para o sucesso do Programa Artemis e para o futuro da exploração espacial.
O rover VIPER, mesmo após seu cancelamento e subsequente renascimento, permanece no centro desta questão. Originalmente programado para ser lançado em 2024, a missão foi projetada especificamente para explorar as RPSs, mapear a concentração e o estado do gelo de água e, assim, pavimentar o caminho para futuras missões de extração de recursos (ISRU). A segurança e, principalmente, a eficiência do VIPER dependem diretamente da resolução do problema do tribocharging. Se o rover for forçado a se mover a uma velocidade de caracol, a quantidade de terreno que ele pode cobrir e analisar durante sua vida útil limitada (cerca de 100 dias terrestres, restritos pela necessidade de manter contato com a Terra e pela duração da noite lunar) seria severamente comprometida, colocando em risco os objetivos primários da missão.
A pesquisa de Farrell e Zimmerman, portanto, não foi apenas um alerta, mas um chamado à ação para a comunidade de engenharia. As soluções desenvolvidas para o VIPER e para os futuros rovers do Programa Artemis, como o Veículo de Terreno Lunar (LTV) tripulado, provavelmente incorporarão uma abordagem integrada e redundante:
- Design Passivo Inteligente: As rodas serão condutivamente acopladas ao chassi, e os materiais serão cuidadosamente selecionados com base em testes triboelétricos para minimizar a geração de carga.
- Dissipação Ativa Controlada: Os rovers provavelmente serão equipados com sistemas de dissipação ativa, como lâmpadas UV ou emissores de elétrons, que serão ativados por sensores quando o potencial elétrico a bordo atingir um limiar pré-definido.
- Planejamento de Missão Adaptativo: As rotas de exploração serão planejadas para maximizar o tempo em áreas com maior densidade de plasma, e os rovers empregarão estratégias de “parar e descarregar” em suas travessias pelas regiões mais esgotadas de plasma.

Conclusão: Da Ciência ao Salto Gigante
A eletricidade estática, um fenômeno que na Terra raramente passa de uma pequena inconveniência, emerge no ambiente lunar como um dos maiores desafios de engenharia para a nova era da exploração espacial. A descoberta de um limite de velocidade de 0,2 cm/s nas Regiões Permanentemente Sombreadas ilustra perfeitamente como a nossa jornada de volta à Lua é tanto sobre a superação de grandes desafios logísticos quanto sobre a compreensão e o domínio das nuances físicas de um mundo alienígena.
A busca pelo gelo de água nos polos lunares é uma busca por autonomia, pela capacidade de transformar a Lua de um mero destino em um verdadeiro trampolim para o Sistema Solar. No entanto, essa busca não pode ser uma corrida imprudente. A ciência, através do modelo de Farrell e Zimmerman, nos deu o limite e nos alertou sobre os perigos. Agora, cabe à engenharia, com sua criatividade e rigor, nos dar a liberdade de ir além dele com segurança.
A superação deste obstáculo definirá o ritmo da nossa presença permanente no satélite e determinará se a próxima fase da exploração humana será uma marcha lenta e cautelosa ou um novo e confiante “salto gigante para a humanidade”.
FONTES E REFERÊNCIAS
[1] NASA. (2026). Artemis. NASA Humans in Space. Disponível em: https://www.nasa.gov/humans-in-space/artemis/ [2] Tomaswick, A. (2026). Electric Shocks Could Enforce a Lunar Speed Limit. Universe Today. Disponível em: https://www.universetoday.com/170506/electric-shocks-could-enforce-a-lunar-speed-limit/ [3] Farrell, W.M., & Zimmerman, M.I. (2026). Rover wheel tribocharging in lunar shadowed regions: deriving a speed limit for charge accumulation. Advances in Space Research, 77(1), 1218-1234. DOI: https://doi.org/10.1016/j.asr.2025.10.102 [4] Carrier, W.D., Olhoeft, G.R., & Mendell, W. (1991). Physical properties of the lunar surface. In Lunar Sourcebook: A User’s Guide to the Moon (pp. 475-594). Cambridge University Press. [5] Yeo, L.H., Wang, X., Dove, A., & Horányi, M. (2023). Laboratory investigations of triboelectric charging of dust by rover wheels. Advances in Space Research, 71(1), 123-132. [6] NASA. (2024). Lunar Roving Vehicle. NASA History. Disponível em: https://www.nasa.gov/history/lunar-roving-vehicle/ [7] NASA. (2025). NASA Selects Blue Origin to Deliver VIPER Rover to Moon’s South Pole. NASA News Release. Disponível em: https://www.nasa.gov/news-release/nasa-selects-blue-origin-to-deliver-viper-rover-to-moons-south-pole/ [8] NASA Science. (2023). VIPER: Volatiles Investigating Polar Exploration Rover. Disponível em: https://science.nasa.gov/mission/viper/ [9] Jackson, T.L., Farrell, W.M., Zimmerman, M.I., Stubbs, T.J., Halekas, J.S., & Collier, M.R. (2015). Charging effects on the lunar surface in shadowed regions. Journal of Geophysical Research: Planets, 120(11), 1929-1943. [10] Halekas, J.S., Delory, G.T., Brain, D.A., Lin, R.P., & Mitchell, D.L. (2005). Density cavity observed over a strong lunar crustal magnetic anomaly in the solar wind: A mini-magnetosphere? Planetary and Space Science, 53(3), 299-309. [11] Zimmerman, M.I., Farrell, W.M., Stubbs, T.J., Halekas, J.S., & Jackson, T.L. (2011). Solar wind access to lunar polar craters: Feedback between surface charging and plasma expansion. Geophysical Research Letters, 38(19). [12] Zimmerman, M.I., Jackson, T.L., Farrell, W.M., & Stubbs, T.J. (2012). Plasma wake simulations and object charging in a shadowed lunar crater during a solar storm. Journal of Geophysical Research: Space Physics, 117(A7).

Comente!