
A visão da humanidade se aventurando para além da Terra sempre esteve intrinsecamente ligada à nossa capacidade de nos proteger dos rigores implacáveis do espaço. A Lua e Marte, nossos vizinhos mais próximos e alvos de futuras missões tripuladas, apresentam ambientes tão hostis que a sobrevivência humana a longo prazo exige soluções engenhosas e inovadoras. É nesse contexto que surge uma pesquisa europeia revolucionária, focada no desenvolvimento de uma equipe de robôs cooperativos projetados para explorar as profundezas ocultas de tubos de lava lunares e marcianos. Estes verdadeiros escoteiros robóticos não são apenas exploradores; eles são a vanguarda para a proteção de astronautas e equipamentos, desvendando o potencial desses abrigos naturais contra as ameaças mais severas do espaço.
A ideia de usar cavernas como refúgio não é nova, mas a aplicação de uma equipe robótica heterogênea para mapear e avaliar esses locais é um salto gigantesco. Imagine um futuro onde bases lunares e marcianas estejam aninhadas com segurança sob a superfície, protegendo nossos aventureiros das fúrias cósmicas. Esse é o sonho que está sendo pavimentado por este trio de robôs – SherpaTT, Coyote III e LUVMI-X – que, em testes recentes em uma ilha vulcânica na Espanha, demonstraram a viabilidade de uma exploração autônoma e cooperativa. Liderada por Raul Dominguez, do Centro Alemão de Pesquisa para Inteligência Artificial, esta equipe está na vanguarda do que pode ser o próximo grande capítulo da exploração espacial.
O Cenário Hostil: Por Que Precisamos de Abrigos Subterrâneos na Lua e em Marte?
Para compreender a importância vital desses robôs e de sua missão, precisamos primeiro entender a natureza implacável do ambiente lunar e marciano. Longe da atmosfera protetora da Terra e de seu campo magnético, nossos satélites e planetas vizinhos estão constantemente expostos a uma série de perigos que tornam a vida humana na superfície extremamente desafiadora.
Um dos perigos mais significativos é a radiação solar poderosa. Fora da “esfera protetora” da Terra, os astronautas são bombardeados por partículas energéticas emitidas pelo Sol, conhecidas como radiação cósmica e solar. Essa radiação pode causar danos celulares, aumentar o risco de câncer, prejudicar sistemas eletrônicos e comprometer a saúde a longo prazo dos exploradores. Uma exposição prolongada seria catastrófica para qualquer missão tripulada, exigindo blindagens maciças e, preferencialmente, abrigos naturais.
Além da radiação, a Lua, em particular, é conhecida por suas flutuações extremas de temperatura, as mais selvagens em todo o Sistema Solar. As temperaturas na superfície lunar podem atingir picos escaldantes de 121 graus Celsius durante o dia lunar e despencar para incríveis -146 graus Celsius durante a noite lunar. Em algumas localizações polares, onde a luz solar nunca alcança, o frio é permanente e extremo, chegando a -240 graus Celsius. Essas variações térmicas drásticas não apenas representam um desafio imenso para a engenharia de habitats e equipamentos, mas também para a fisiologia humana. A proteção contra essas amplitudes térmicas é tão crucial quanto a proteção contra a radiação.
E como se isso não bastasse, há também a ameaça constante de micrometeoritos. Sem uma atmosfera para desacelerá-los ou queimá-los, esses pequenos fragmentos de rocha e poeira cósmica atingem a superfície lunar em velocidades extremamente altas, até 70 quilômetros por segundo (157.000 milhas por hora). A pesquisa sugere que até 10.000 kg de micrometeoritos podem atingir a Lua todos os dias, transformando a superfície em um alvo constante de impactos. Mesmo os menores micrometeoritos, devido à sua velocidade, podem causar danos significativos a equipamentos, trajes espaciais e até estruturas habitáveis. Para os astronautas, estar protegido de todas essas ameaças é essencial para o sucesso e a segurança de qualquer missão.
O Santuário Subterrâneo: A Promessa dos Tubos de Lava
Diante de um ambiente tão inóspito, a busca por abrigos naturais se tornou uma prioridade. É aqui que os tubos de lava entram em cena, oferecendo uma solução elegante e naturalmente robusta. Imagens orbitais da Lua revelam a existência de numerosos tubos de lava que poderiam, de fato, manter os astronautas seguros.
Mas o que são exatamente esses tubos de lava? Eles são formações geológicas impressionantes, criadas durante antigas erupções vulcânicas. Quando a lava fluía pela superfície, as camadas externas se resfriavam e solidificavam primeiro, formando um “teto” e “paredes”, enquanto a lava mais quente e fluida continuava a escoar por baixo. Quando a erupção cessava e a lava interna drenava, restava um túnel oco – o tubo de lava.
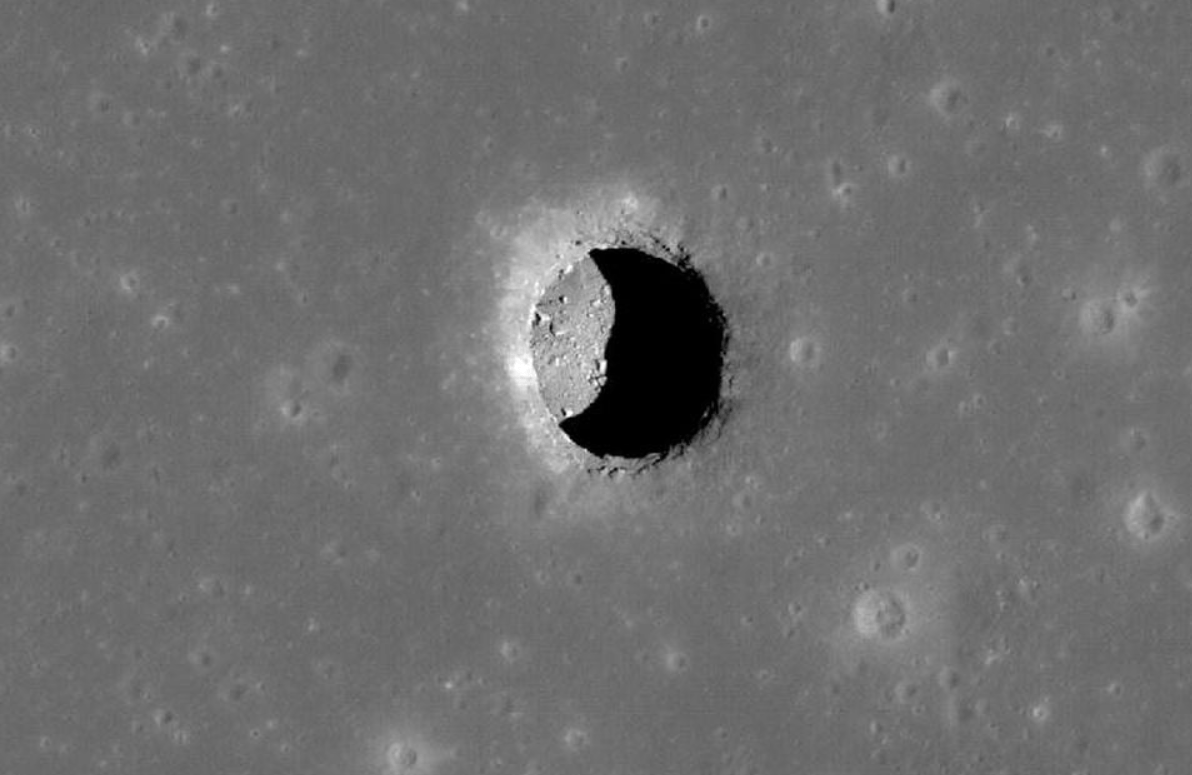
Em alguns pontos, o teto desses tubos de lava colapsou, deixando aberturas visíveis na superfície, que são chamadas de “claraboias” (skylights). Essas claraboias são de grande interesse para os cientistas, pois representam possíveis entradas para esses abrigos subterrâneos. Uma imagem da Sonda de Reconhecimento Lunar (LRO) da NASA, por exemplo, mostra uma seção de teto desabado em um tubo de lava em Mare Tranquillitatis. Essa cratera tem aproximadamente 100 metros de profundidade, mas a verdadeira extensão e tamanho do tubo de lava só podem ser determinadas por exploração direta.
Além das claraboias, a superfície lunar também exibe rilles sinuosas visíveis, que são canais serpentinos que indicam o caminho e o comprimento de alguns desses tubos. Embora muitos desses canais tenham colapsado quase completamente ao longo de bilhões de anos, outros permanecem intactos. Algumas rilles alcançam grandes comprimentos; a Rima Sharp, por exemplo, localizada no lado próximo da Lua, tem até 566 km de extensão, embora alguns pesquisadores a considerem duas rilles separadas. A existência dessas estruturas sugere uma rede subterrânea vasta e potencialmente explorável.
A pesquisa em torno da ideia de usar essas cavernas para proteção é intensa. Já existem conceitos para bases construídas dentro delas, onde os astronautas poderiam viver e trabalhar, desfrutando de um escudo natural contra as adversidades da superfície. No entanto, antes que esses planos possam tomar quaisquer medidas concretas, esses tubos de lava precisam ser cuidadosamente explorados. As claraboias são vistas como entradas potenciais, e os cientistas têm dedicado esforços significativos para determinar como acessá-las e desvendar seus segredos.
A Vanguarda Robótica: Conhecendo o Trio de Exploradores
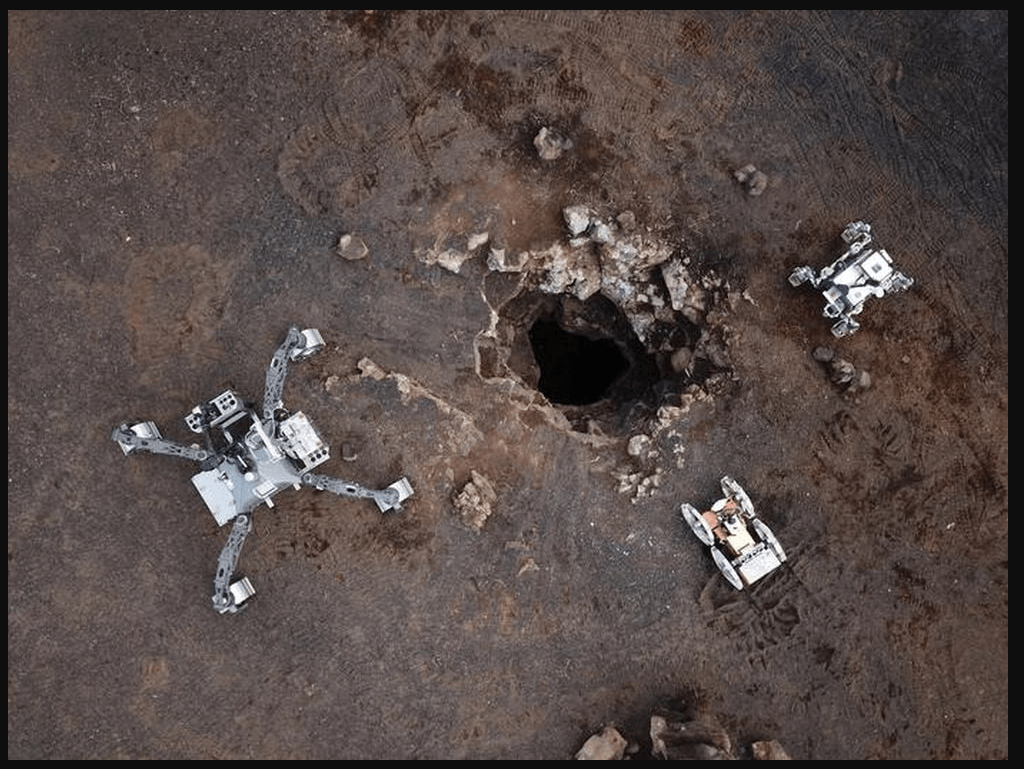
Para enfrentar o desafio de explorar esses ambientes inóspitos e inacessíveis, uma equipe de pesquisadores europeus projetou um trio de robôs, cada um com capacidades distintas, mas trabalhando em conjunto para explorar cavernas lunares e avaliar seu potencial. A força dessa abordagem reside na heterogeneidade e na cooperação autônoma dos robôs, que permitem superar obstáculos que um único robô não conseguiria.
Os testes dessa equipe foram realizados na Ilha de Lanzarote, um local ideal devido à sua paisagem vulcânica, que oferece um análogo terrestre convincente para as condições lunares e marcianas. O trabalho da equipe foi detalhado em uma nova carta de pesquisa publicada na revista Science Robotics, intitulada “Cooperative robotic exploration of a planetary skylight surface and lava cave”.
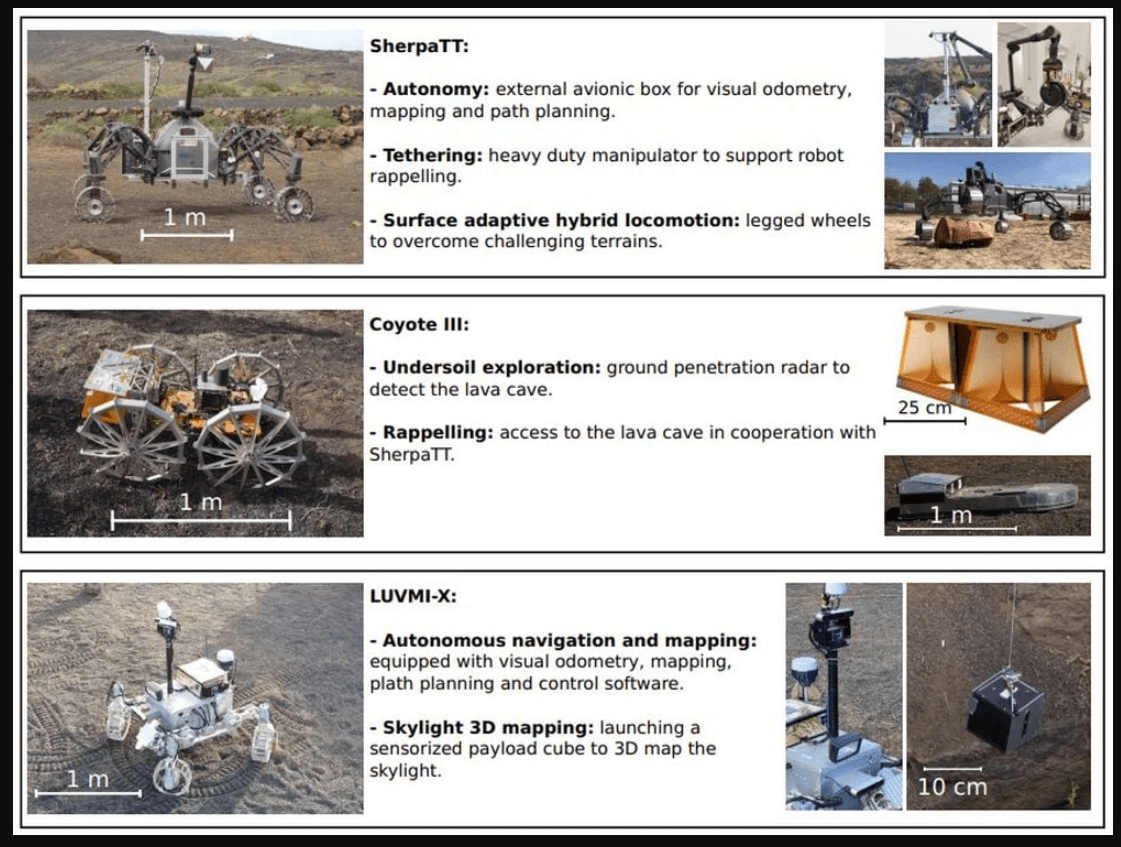
Vamos conhecer os membros desta equipe de elite:
- SherpaTT: Este é o gigante da equipe, um robô híbrido que combina rodas e pernas. Essa configuração lhe confere uma versatilidade excepcional, permitindo-lhe realizar exploração de superfície em terrenos variados, mas também atuar como uma âncora de superfície. Sua robustez e capacidade de locomoção em terrenos difíceis são cruciais para as fases iniciais da missão. SherpaTT também colabora com o LUVMI-X no mapeamento da superfície. A escolha de um design híbrido não é arbitrária; ela permite que o robô navegue tanto em superfícies relativamente planas quanto em terrenos mais irregulares, rochosos e inclinados, utilizando as pernas para superar obstáculos que seriam intransponíveis para um robô puramente com rodas.
- Coyote III: O explorador ágil e intrépido das profundezas. Coyote III é um rover pequeno, leve e altamente móvel, projetado especificamente para descer em claraboias e explorar o interior dos tubos de lava. Sua mobilidade é essencial para navegar nos espaços confinados e nos terrenos acidentados encontrados nas cavernas. Sua tarefa principal é a exploração e o mapeamento 3D do interior do tubo. Sua leveza é uma vantagem em um ambiente de baixa gravidade, e seu design compacto permite que ele seja implantado em locais de difícil acesso. Ele é o “olho” da missão dentro do tubo, coletando dados críticos sobre a estrutura, segurança e potencial de habitabilidade.
- LUVMI-X: O mapeador e lançador de carga útil. LUVMI-X é o terceiro rover, caracterizado por ser leve e economicamente eficiente. Sua principal função é realizar o mapeamento em conjunto com o SherpaTT na superfície. No entanto, ele também desempenha um papel crucial na fase inicial de reconhecimento da caverna, sendo responsável por ejetar um cubo de carga útil sensorizado, equipado com câmeras de alta velocidade, para coletar dados preliminares sobre a entrada e o piso da caverna. Sua função é essencial para a coleta de informações cruciais antes da descida de Coyote III, garantindo que a entrada seja segura e fornecendo um panorama inicial do interior.
A Missão em Quatro Fases: Uma Coreografia Robótica Autônoma
A exploração dos tubos de lava é dividida em quatro fases distintas, cada uma projetada para maximizar a segurança e a eficiência, permitindo que os robôs trabalhem juntos de forma autônoma para alcançar seus objetivos.
Fase 1: Mapeamento da Área de Entrada e Reconhecimento da Superfície Nesta fase inicial, os robôs SherpaTT e LUVMI-X colaboram para mapear a área ao redor da entrada do túnel de lava, a claraboia. O objetivo é gerar um Modelo Digital de Elevação (DEM) com precisão suficiente para identificar claramente a claraboia e posicionar os rovers corretamente para as fases subsequentes da missão. Este mapeamento de superfície é vital para planejar a descida segura e para entender o terreno circundante, identificando potenciais perigos ou melhores pontos de ancoragem.
Fase 2: Reconhecimento Inicial da Caverna com Carga Útil Após o mapeamento da superfície, o LUVMI-X desempenha um papel crucial ao ejetar um cubo de carga útil sensorizado – um pequeno dispositivo equipado com câmeras de alta velocidade – para dentro da caverna. Este cubo tem como objetivo coletar dados iniciais sobre a entrada e o piso da caverna, fornecendo uma visão preliminar do interior sem a necessidade de enviar um robô maior imediatamente. Os pesquisadores explicam que durante os testes, o cubo demonstrou sua capacidade de recriar a claraboia em 3D, emulando uma queda livre sob gravidade lunar através de um sistema de polias. Esta etapa é uma medida de segurança e eficiência, permitindo avaliar o ambiente interno antes de um engajamento robótico mais profundo.
Fase 3: Descida do Explorador Scout Com os dados iniciais em mãos, o rover explorador Coyote III é então rapelado para dentro da caverna. Ele é ancorado ao SherpaTT, que permanece na superfície, atuando como um ponto de apoio seguro. Esta fase crítica envolve a descida controlada e autônoma do Coyote III. Nos testes, o Coyote III foi baixado para dentro da caverna sem sofrer danos, um feito significativo que valida a engenharia e os algoritmos de controle. A ancoragem de superfície é fundamental, especialmente em ambientes de baixa gravidade como a Lua, para evitar que o rover caia sem controle ou fique preso.
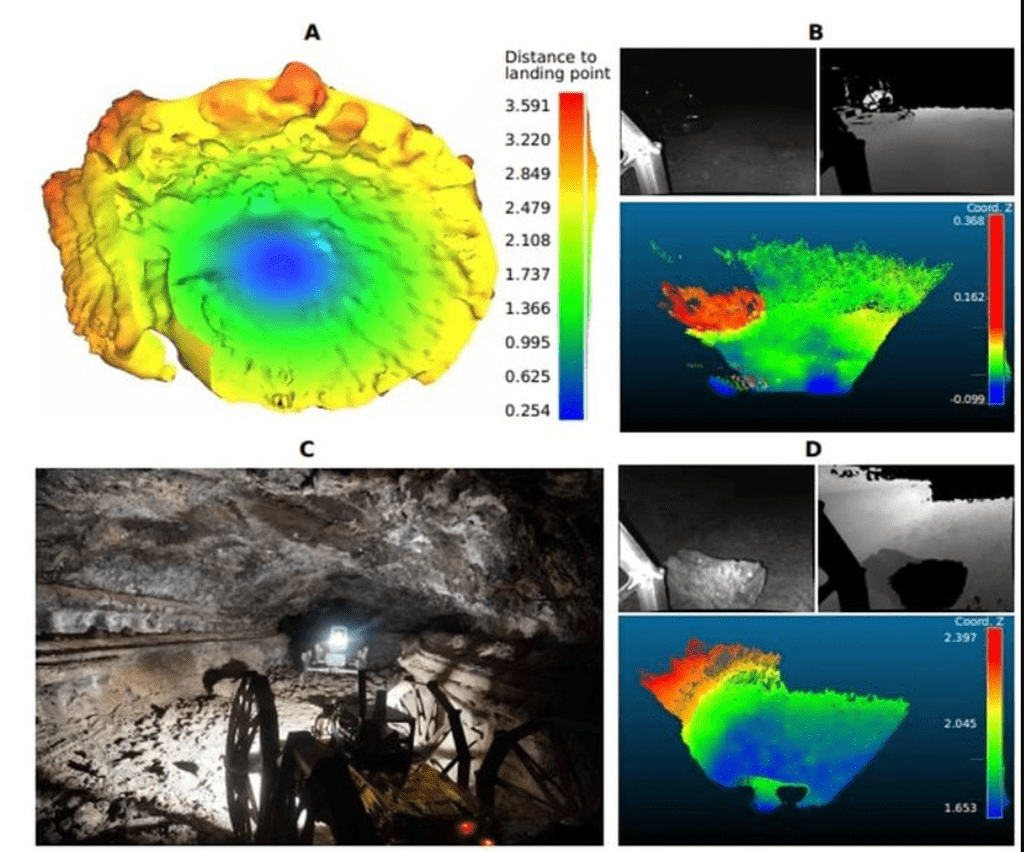
Fase 4: Exploração e Mapeamento 3D da Caverna Uma vez dentro da caverna, o rover Coyote III assume sua função principal: explorar e mapear o interior do tubo em 3D. Esta é a fase mais complexa e detalhada, onde o Coyote III percorre o terreno acidentado da caverna, coletando nuvens de pontos através de controle remoto. Os dados coletados são essenciais para criar modelos tridimensionais precisos da caverna, avaliando seu tamanho, comprimento, largura, e identificando características geológicas importantes, bem como potenciais áreas para futuras instalações humanas. A validação da locomoção e da abordagem de aquisição de dados do Coyote III foi um sucesso, demonstrando sua adequação para a tarefa. Imagens dos resultados dos testes desta fase mostram a reconstrução da claraboia e a visualização dos dados do tempo de voo, bem como o rover atravessando um corredor estreito, validando a eficácia do Coyote III.
O Campo de Testes: Lanzarote, um Análogo Lunar na Terra
A equipe de pesquisa não se limitou a simulações de computador; eles levaram seus robôs para um ambiente real que simulasse as condições da Lua o mais próximo possível. A escolha recaiu sobre a Ilha de Lanzarote, nas Ilhas Canárias, Espanha, onde os testes de campo foram realizados em fevereiro de 2023. Lanzarote é uma ilha vulcânica conhecida por suas paisagens áridas e formações rochosas que mimetizam os terrenos extraterrestres, tornando-a um local ideal para testar equipamentos e metodologias de exploração planetária.
Os pesquisadores tinham como objetivo testar cada fase da missão várias vezes para avaliar a eficácia e identificar melhorias necessárias. Embora restrições climáticas e outras limitações tenham impedido a realização de tantos testes quanto desejado, a equipe ainda conseguiu resultados positivos e encorajadores.
Os resultados detalhados dos testes confirmam a capacidade da equipe robótica:
- Fase de Missão 1 (MP-1): SherpaTT e LUVMI-X colaboraram com sucesso para gerar um Modelo Digital de Elevação (DEM) com precisão suficiente para identificar a claraboia e posicionar os rovers corretamente para as fases subsequentes. Esta etapa é crucial para a segurança e eficácia da descida.
- Fase de Missão 2 (MP-2): A claraboia foi explorada com sucesso usando o cubo de carga útil, que demonstrou sua capacidade de recriar a claraboia em 3D, emulando uma queda livre sob gravidade lunar através de um sistema de polias. Isso valida a abordagem de reconhecimento inicial sem riscos para os rovers principais.
- Fase de Missão 3 (MP-3): O Coyote III foi baixado autonomamente para dentro da caverna sem qualquer dano, um testemunho da precisão dos sistemas de controle e ancoragem.
- Fase de Missão 4 (MP-4): A porção de mapeamento da caverna do teste também foi validada. O Coyote III se mostrou adequado para atravessar o terreno difícil e coletar nuvens de pontos através de controle remoto, validando assim a abordagem de locomoção e aquisição de dados. O rover conseguiu atravessar diferentes terrenos dentro da caverna, embora tenha encontrado uma limitação: não conseguiu executar curvas de ponto (rotação no mesmo lugar) em “superfícies rochosas irregulares consolidadas devido ao alto atrito”. Esta é uma lição valiosa que aponta para áreas de melhoria no design de locomoção, garantindo que as futuras versões possam operar com maior flexibilidade em terrenos lunares e marcianos ainda mais imprevisíveis.
Imagens dos testes na Fase 4, como as painéis mostradas na pesquisa, ilustram a malha da claraboia produzida por Coyote III, a visualização de dados de tempo de voo, o rover viajando por um corredor estreito e a reconstrução da caverna. Esses visuais são evidências concretas da capacidade da equipe robótica de realizar as tarefas de exploração e mapeamento que lhes foram atribuídas.
Além da Lua: Implicações para Marte e a Busca por Vida
A pesquisa não se limita apenas à Lua; Marte também é parte fundamental desse trabalho. Nosso vizinho vermelho também possui tubos de lava com claraboias colapsadas, e futuros astronautas que visitarem o planeta poderiam se beneficiar enormemente de sua proteção contra radiação e micrometeoritos, assim como na Lua.
No entanto, Marte adiciona uma camada extra de importância: sua relevância astrobiológica, que a Lua, até onde sabemos, não possui. A busca por sinais de vida passada ou presente em Marte é um dos objetivos primordiais da exploração espacial. Cavernas de lava em Marte poderiam ter oferecido ambientes isolados e protegidos da radiação e das condições severas da superfície, aumentando a chance de preservar quaisquer “assinaturas exobiológicas” – vestígios de vida microbiana antiga. A exploração robótica dessas cavernas se torna, portanto, uma porta para desvendar um dos maiores mistérios do universo: estamos sozinhos?
Os autores da pesquisa enfatizam: “A exploração de cavernas de lava na superfície de corpos planetários próximos à Terra é de alta importância para a pesquisa científica e a exploração espacial”. Eles ressaltam que o escudo natural que essas cavernas oferecem contra a radiação e pequenos meteoritos as torna “bem adequadas para preservar assinaturas exobiológicas e proteger instalações humanas”.
A utilização de uma equipe de robôs surge como a maneira mais segura e econômica de explorar cavernas de lava extraterrestres, principalmente porque são de difícil acesso para humanos ou para um único robô. A cooperação e a heterogeneidade da equipe minimizam riscos e maximizam a coleta de dados, pavimentando o caminho para futuras missões humanas.
Conclusão: O Próximo Salto para a Presença Humana no Espaço
A equipe europeia de pesquisadores demonstrou que um “time de robôs autônomos e heterogêneos é uma abordagem promissora” para a exploração de cavernas de lava lunares e marcianas. O teste de campo analógico em Lanzarote mostrou “desempenhos confiáveis e eficientes na maioria das fases da missão definidas”.
Embora o conceito da missão necessite de mais pesquisa para ser extrapolado para um cenário real de exploração planetária, os resultados são inegavelmente encorajadores. Este trabalho representa um passo crucial para o estabelecimento de uma presença humana sustentável além da Terra. Ao desvendar os segredos dos tubos de lava, esses robôs não estão apenas mapeando cavernas; eles estão traçando o futuro da humanidade no cosmos, abrindo portas para a proteção, pesquisa científica e, talvez, até mesmo a colonização de outros mundos.
O sonho de bases subterrâneas em outros planetas, onde astronautas possam trabalhar e viver protegidos, está se tornando uma realidade palpável. A complexidade do trabalho em equipe desses robôs, a resiliência demonstrada em ambientes análogos e a clareza da visão para o futuro da exploração espacial reforçam a ideia de que, com inovação e cooperação, os limites do que podemos alcançar no espaço estão em constante expansão.


Comente!