
Nos próximos dois anos, novos rovers explorarão mais da superfície da lua do que nunca. Por meio de seu programa Artemis , a NASA planeja enviar humanos à Lua pela primeira vez em cinco décadas, estabelecendo as bases para a construção de uma base lunar permanente. Mas antes que qualquer astronauta coloque os pés na Lua, um conjunto multinacional de robôs estará dando seus primeiros passos pelo solo lunar.
No início da década de 1970, tanto os Estados Unidos quanto a União Soviética enviaram rovers para a Lua, mas desde então, apenas dois novos rovers exploraram com sucesso a superfície lunar. O rover chinês Yutu pousou em 2013, seguido pelo Yutu-2 em 2019, que ainda está na Lua até hoje.
Terry Fong , um especialista em robôs do Centro de Pesquisa Ames da NASA, diz que os rovers lunares nesta nova onda variam substancialmente tanto em tamanho quanto em capacidades técnicas, em parte porque cada um está explorando uma parte diferente do satélite. Cada rover tem habilidades únicas para enfrentar os diferentes desafios que enfrentará em seu destino lunar. “O ambiente na Lua é muito diferente dependendo de onde você for”, acrescenta.
Muitas das missões se concentrarão no solo lunar, ou regolito. Alguns rovers marcarão as primeiras tentativas de seus respectivos países de explorar a lua. Com mais de uma dúzia de missões rover planejadas para os próximos três anos, analisamos os projetos e especialistas pesquisados para compartilhar com você detalhes sobre cinco dos mais atraentes.
VIPER
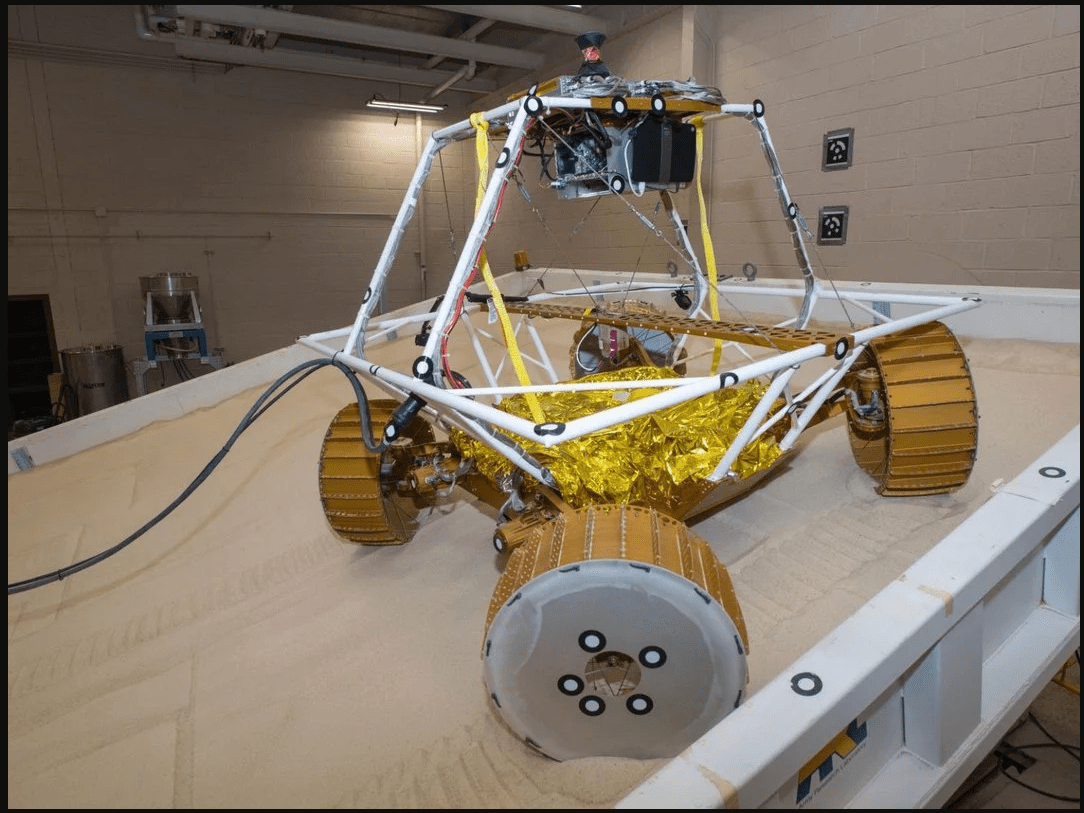
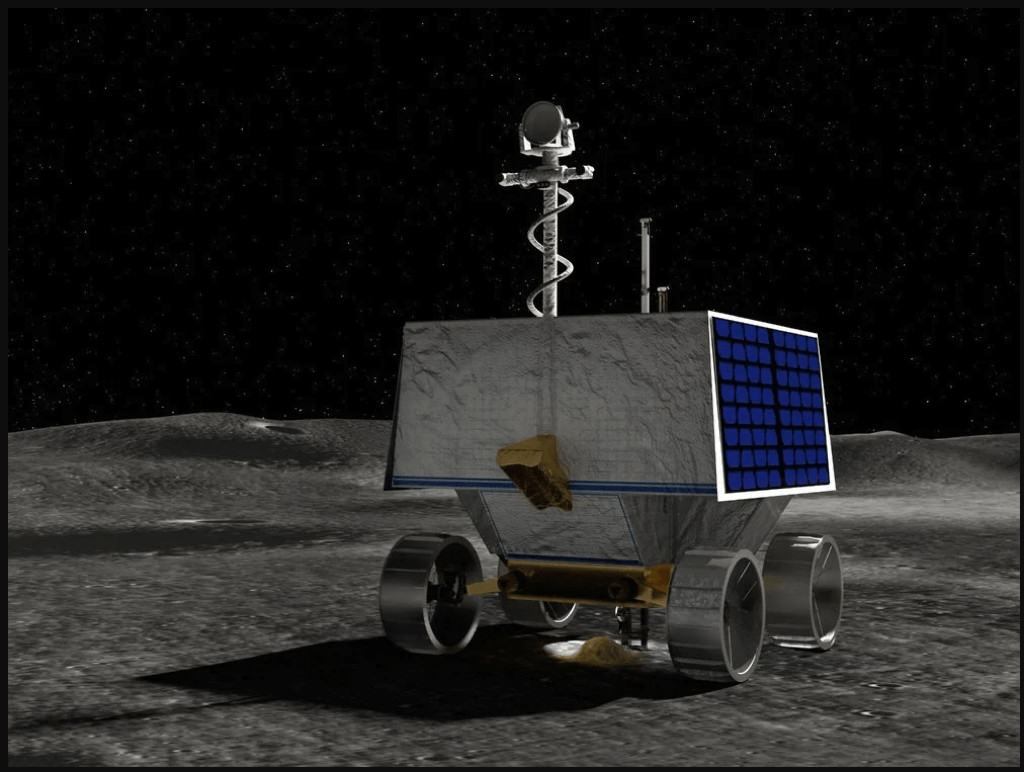
Um componente chave do programa Artemis da NASA é o Volatiles Investigating Polar Exploration Rover, mais conhecido como VIPER . Este rover de 2.5 metros de altura passará 100 dias terrestres explorando o Polo Sul da Lua em 2024 para estudar a água encontrada sob a superfície lunar.
O VIPER ajudará os cientistas a determinar como a água polar é distribuída e se pode ou não ser usada por futuras explorações tripuladas. Para realizar esta missão, o rover levará vários instrumentos científicos , incluindo uma broca para perfurar o gelo e vários espectrômetros que podem detectar átomos de hidrogênio da água.
Partes dos polos são perpetuamente sombreadas, tornando-os os pontos mais frios da lua; as temperaturas podem cair abaixo de menos 400 graus Fahrenheit . O VIPER terá que sobreviver a temperaturas que chegam a 500 graus Fahrenheit mais altas à luz do Sol. O VIPER também viajará sobre texturas e obstáculos de superfície desafiadores, uma perturbação potencial para todos os seus equipamentos científicos sensíveis. As rodas do rover giram em todas as direções, dando-lhe a capacidade de dirigir suavemente para os lados, diagonalmente ou girar em círculos. Cada roda também pode levantar-se independentemente para se extrair de solos arenosos.
Os movimentos do VIPER serão controlados continuamente por engenheiros humanos na Terra devido à distância relativamente curta entre a lua e a Terra. Em contraste com os rovers de Marte, para os quais comandos e dados geralmente são trocados apenas uma vez por dia, os motoristas do VIPER direcionarão o rover em tempo real. Como diz Fong, o VIPER “será operado de uma maneira radicalmente diferente das missões rover anteriores da NASA”.
COLMENA
Enquanto a maioria dos rovers lunares segue o design padrão do carro, o Colmena , a primeira missão espacial mexicana a pousar na lua, sai dessa caixa. Colmena, ou “colmeia” em espanhol, é uma pequena catapulta conectada a um contêiner cilíndrico que abriga cinco minúsculos robôs autônomos. Depois de pousar na lua, a tampa do contêiner se abrirá e a catapulta lançará suas abelhas operárias robóticas a 30 pés na paisagem lunar. Os rovers minúsculos, com menos de uma polegada de altura e cada um pesando cerca de duas onças, têm a forma de anéis achatados envolvendo duas rodas e um painel solar. Depois de serem lançados na superfície, os rovers testarão sua capacidade de navegar e se agrupar de forma autônoma e, em seguida, realizar sua principal missão científica de estudar a superfície lunar.
Colmena foi construído pelo Laboratório de Instrumentação Espacial da Universidad Nacional Autónoma de México (Universidade Nacional Autônoma do México) e viajará para o Lacus Mortis da lua , ou “Lago da Morte”, ainda este ano a bordo de um módulo lunar fabricado pela empresa Astrobotic .
Os minúsculos rovers de Colmena atravessarão uma camada fluida de poeira fofa e flutuante, em vez de passar por uma superfície compacta como os rovers maiores, o que lhes permitirá estudar as propriedades desses bits carregados eletrostaticamente. Eles medirão o tamanho das partículas e as flutuações magnéticas logo acima da superfície lunar, onde a poeira flutuante se mistura com o plasma dos ventos solares. As descobertas dos rovers ajudarão os cientistas a se prepararem para futuras explorações envolvendo robôs miniaturizados.
LUNAR VERTEX
A missão Lunar Vertex tem um objetivo principal: descobrir os segredos dos redemoinhos lunares , as formas curvas de luz e escuridão na superfície da lua que são visíveis através de um telescópio comum.
Dirigido pelo Laboratório de Física Aplicada Johns Hopkins , o Lunar Vertex inclui um rover e um módulo de pouso que realizará uma missão em 2024 em Reiner Gamma , local de um dos redemoinhos lunares mais proeminentes.
Os cientistas propuseram várias explicações para os redemoinhos lunares, e David Blewett , investigador principal do projeto Lunar Vertex, espera que os dados coletados possam ajudar a determinar qual é o correto. “Existem várias hipóteses sobre como eles se formaram e todas fazem previsões sobre a textura e o tamanho das partículas da superfície”, diz Blewett.
O rover é equipado com um microscópio multiespectral para fazer medições do regolito. Com base na grossura, brilho e outras características das partículas, os cientistas podem determinar qual história de origem do redemoinho lunar é mais provável de ser verdade.
O módulo de pouso e o rover também possuem instrumentos para medir os campos magnéticos dos redemoinhos lunares. “A lua hoje não tem um campo magnético global, como a Terra tem”, explica Blewett, mas algumas regiões, como os redemoinhos lunares, são magnetizadas. Esta missão fornecerá a primeira investigação no terreno dessas anomalias magnéticas. Os dados coletados podem ajudar a descobrir a fonte das anomalias e explicar por que elas ocorrem junto com os redemoinhos lunares.
O Lunar Vertex terá apenas 13 dias terrestres, o tempo entre o nascer e o pôr do sol lunar, para viajar em torno de Reiner Gamma e coletar o máximo de dados possível. Se tudo correr bem, este pequeno rover nos ajudará a entender uma das características mais bonitas e enigmáticas da lua.
ROVER JAPONÊS
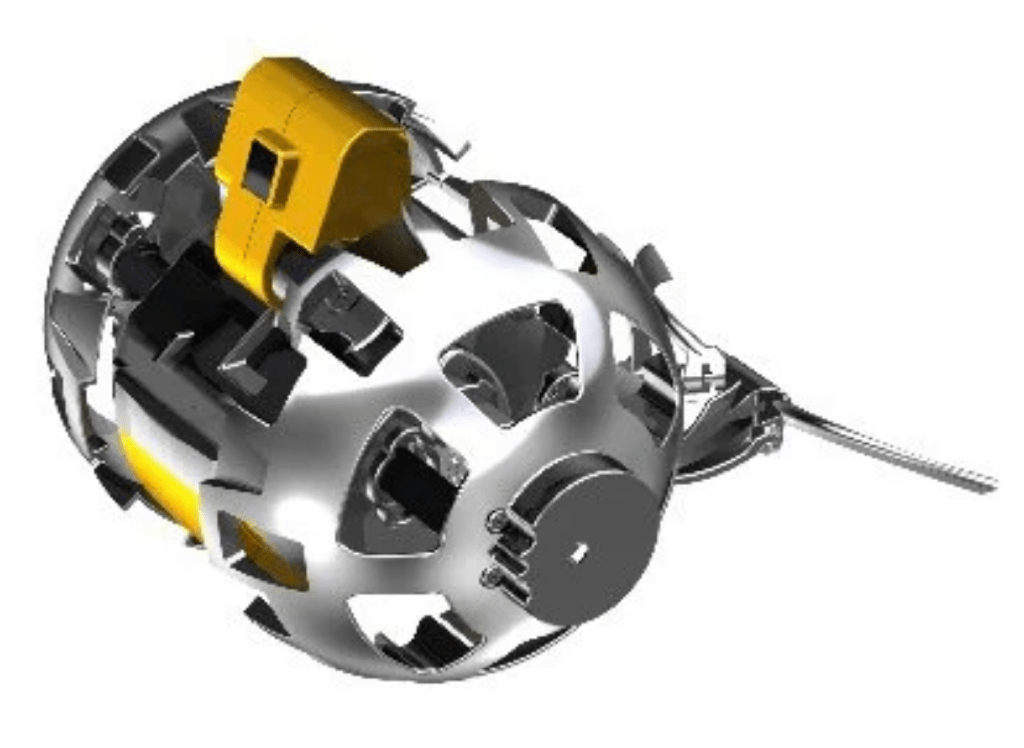
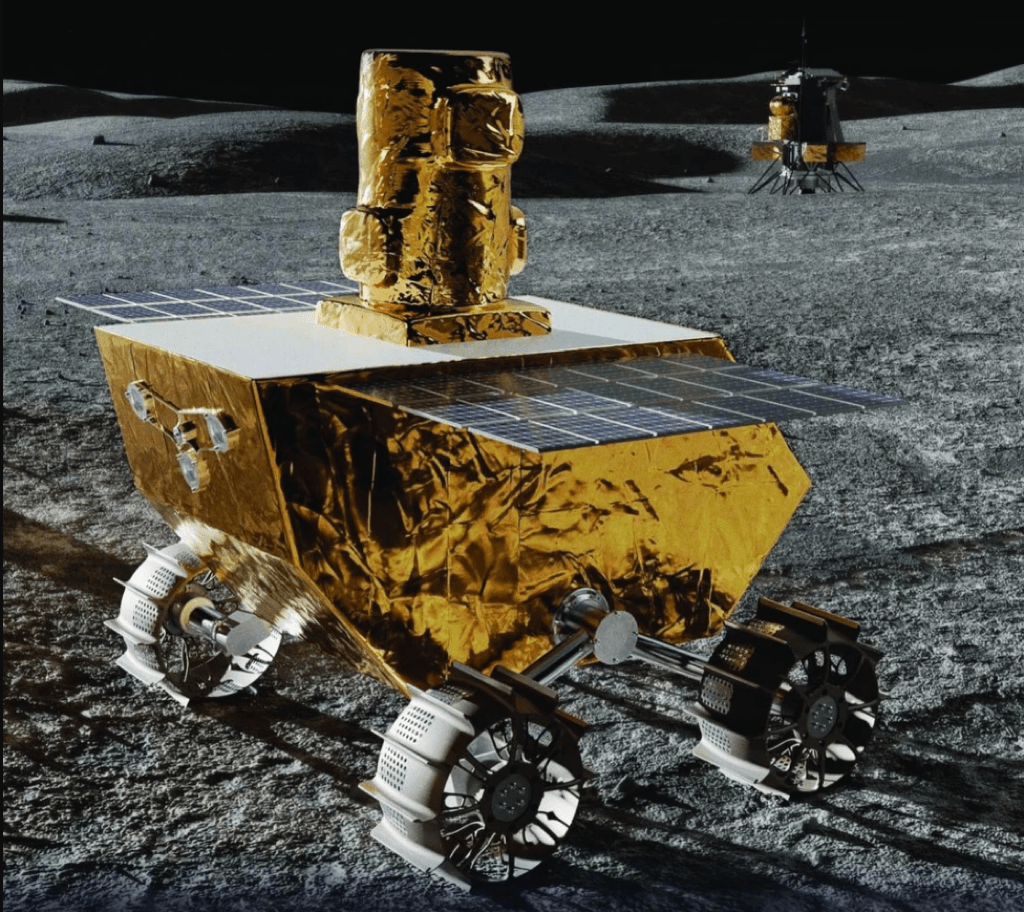
Os aterrissadores e foguetes lunares têm espaço limitado para todas as missões possíveis, portanto, uma grande prioridade para os cientistas tem sido fazer rovers pequenos e leves que possam se movimentar e coletar dados com eficiência. A Agência de Exploração Aeroespacial do Japão (JAXA) se destacou neste jogo de miniaturização de rover. Em colaboração com a Universidade Doshisha, bem como a Sony e a empresa de brinquedos Tomy, a JAXA desenvolveu um pequeno rover que pesa pouco mais de meio quilo e tem a capacidade de se transformar em diferentes formas. “O mecanismo de transformação e a tecnologia que o fabricante de brinquedos japonês usou em brinquedos transformáveis são incorporados ao nosso robô lunar”, escreve um representante da JAXA por e-mail, “o que o torna compacto ao transportar para a superfície lunar”.
Durante o voo para a lua, o pequeno rover permanecerá em uma forma aproximadamente esférica, medindo apenas sete centímetros de diâmetro. Mas uma vez depositado na superfície lunar, ele se dividirá horizontalmente, mudando de forma para revelar câmeras centrais ladeadas por duas rodas robustas e uma cauda. Nesse estado expandido, o rover pode se mover no terreno macio e irregular da superfície lunar.
O rover da JAXA será entregue à Lua ainda este ano por um módulo lunar criado pela empresa espacial japonesa ispace . Seus objetivos são fotografar a superfície lunar enquanto ela responde a perturbações e testar um sistema de navegação. Os dados ajudarão a JAXA a otimizar os projetos para o rover muito maior em que está trabalhando em seguida: o Lunar Cruiser . Resultado de uma colaboração entre a JAXA e a Toyota, o Lunar Cruiser será um veículo totalmente pressurizado que poderá transportar astronautas por milhares de quilômetros pela superfície da lua.
CADRE

Engenheiros do Jet Propulsion Laboratory (JPL) da NASA estão projetando equipes de rovers que trabalham juntos para explorar acima e abaixo da superfície da lua. Chamados de Exploradores Robóticos Distribuídos Autônomos Cooperativos, ou CADRE , esses rovers do tamanho de uma caixa de sapatos são especialistas em coordenar suas ações para realizar uma tarefa, com o mínimo de supervisão humana necessária.
Quatro rovers CADRE serão entregues à Lua em 2024 a bordo de um módulo lunar da empresa espacial americana Intuitive Machines . Eles usarão suas habilidades de trabalho em equipe, juntamente com a tecnologia de radar de penetração no solo, para criar um mapa 3-D do subsolo. A criação deste mapa exigirá que os rovers se movam em sincronia uns com os outros, fazendo medições simultaneamente de vários locais diferentes.
Subha Comandur, líder do projeto CADRE no JPL, explica que tudo o que os engenheiros precisam fazer é dizer à equipe do rover qual região explorar, e as máquinas a partir daí. Eles até escolhem seu próprio líder para dirigir a missão. “O líder então decide o caminho e o comunica aos agentes individuais”, diz ela.
De acordo com Comandur, os rovers podem trabalhar juntos em equipes de qualquer tamanho e se ajustar de forma flexível à perda de um companheiro de equipe no meio da missão, permitindo que realizem trabalhos perigosos ou arriscados. “Um rover pode sucumbir ao ambiente lunar e a equipe restante se adaptará”, diz ela.
Espera-se que os rovers sejam úteis muito além da lua também. “Já existem planos para infundir essa tecnologia na próxima missão a Marte”, diz Comandur. E ela sugere que o CADRE poderia um dia explorar também as luas de Júpiter.
Fonte:


Comente!